 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparsified Simultaneous Confidence Intervals for High-Dimensional Linear Models
Jul 14, 2023Statistical inference of the high-dimensional regression coefficients is challenging because the uncertainty introduced by the model selection procedure is hard to account for. A critical question remains unsettled; that is, is it possible and how to embed the inference of the model into the simultaneous inference of the coefficients? To this end, we propose a notion of simultaneous confidence intervals called the sparsified simultaneous confidence intervals. Our intervals are sparse in the sense that some of the intervals' upper and lower bounds are shrunken to zero (i.e., $[0,0]$), indicating the unimportance of the corresponding covariates. These covariates should be excluded from the final model. The rest of the intervals, either containing zero (e.g., $[-1,1]$ or $[0,1]$) or not containing zero (e.g., $[2,3]$), indicate the plausible and significant covariates, respectively. The proposed method can be coupled with various selection procedures, making it ideal for comparing their uncertainty. For the proposed method, we establish desirable asymptotic properties, develop intuitive graphical tools for visualization, and justify its superior performance through simulation and real data analysis.
Terrain Inclination Aided Three Dimensional Localization and Mapping for an Outdoor Mobile Robot
May 03, 2019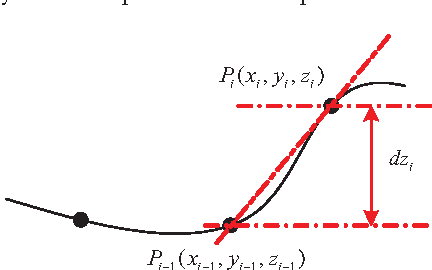
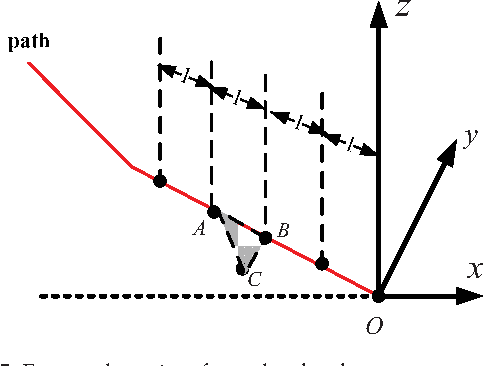
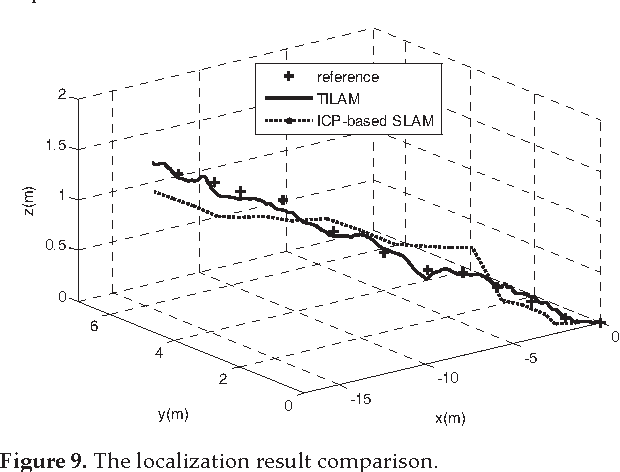
A new 3D localization and mapping techinque with terrain inclination assistance is proposed in this paper to allow a robot to identify its location and build a global map in an outdoor environment. The Iterative Closest Points (ICP) algorithm and terrain inclination-based localization are combined together to achieve accurate and fast localization and mapping. Inclinations of the terrains the robot navigates are used to achieve local localization during the interval between two laser scans. Using the results of the above localization as the initial condition, the ICP algorithm is then applied to align the overlapped laser scan maps to update the overhanging obstacles for building a global map of the surrounding area. Comprehensive experiments were carried out for the validation of the proposed 3D localization and mapping technique. The experimental results show that the proposed technique could reduce time consumption and improve the accuracy of the performance.
Vision-based Unscented FastSLAM for Mobile Robot
May 03, 2019
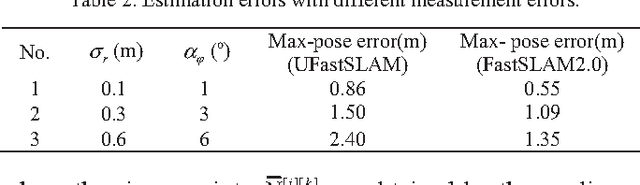
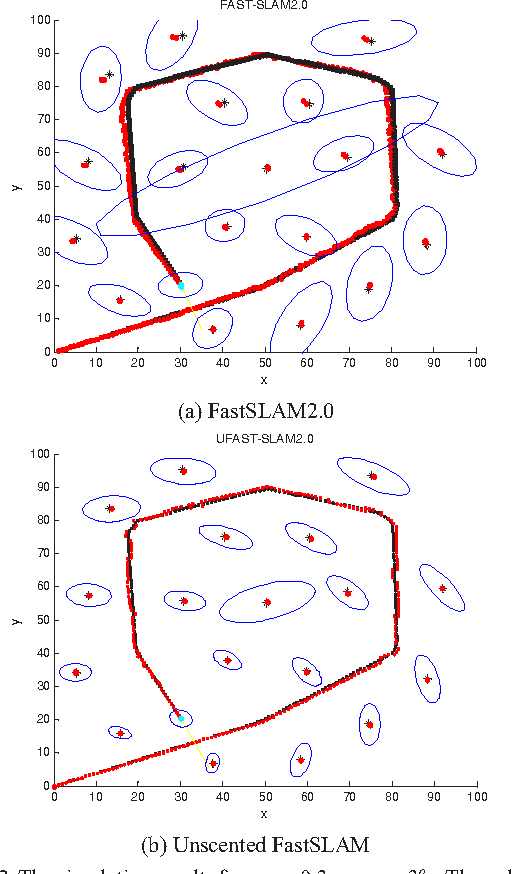
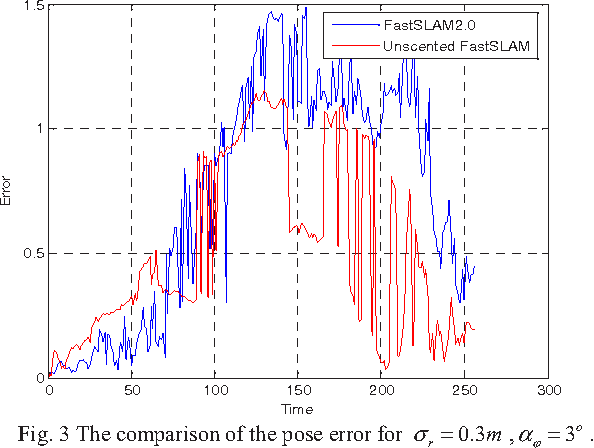
This paper presents a vision-based Unscented FastSLAM (UFastSLAM) algorithm combing the Rao-Blackwellized particle filter and Unscented Kalman filte(UKF). The landmarks are detected by a binocular vision to integrate localization and mapping. Since such binocular vision system generally inherits larger measurement errors, it is suitable to adopt Unscented FastSLAM to improve the performance of localization and mapping. Unscented FastSLAM takes advantage of UKF instead of the linear approximations of the nonlinear function where the effective number of particles is used as the criteria to reduce the particle degeneration. Simulations and experiments are carried out to demonstrate that the Unscented FastSLAM algorithm can achieve much better performance in the vision-based system than FastSLAM2.0 algorithm on the accuracy and robustness.
Bilinear discriminant feature line analysis for image feature extraction
May 03, 2019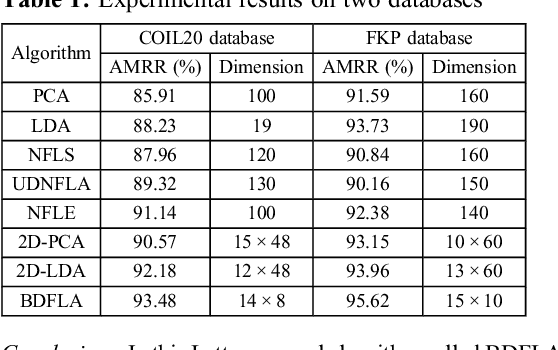
A novel bilinear discriminant feature line analysis (BDFLA) is proposed for image feature extraction. The nearest feature line (NFL) is a powerful classifier. Some NFL-based subspace algorithms were introduced recently. In most of the classical NFL-based subspace learning approaches, the input samples are vectors. For image classification tasks, the image samples should be transformed to vectors first. This process induces a high computational complexity and may also lead to loss of the geometric feature of samples. The proposed BDFLA is a matrix-based algorithm. It aims to minimise the within-class scatter and maximise the between-class scatter based on a two-dimensional (2D) NFL. Experimental results on two-image databases confirm the effectiveness.
Cooperative Distributed Robust Control of Modular Mobile Robots with Bounded Curvature and Velocity
May 03, 2019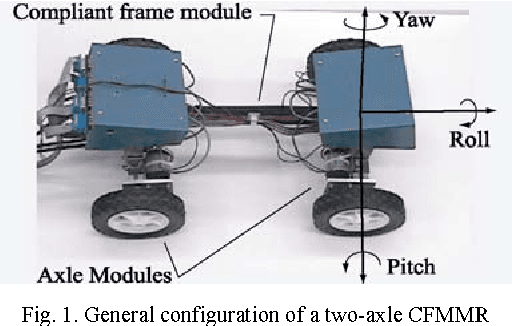

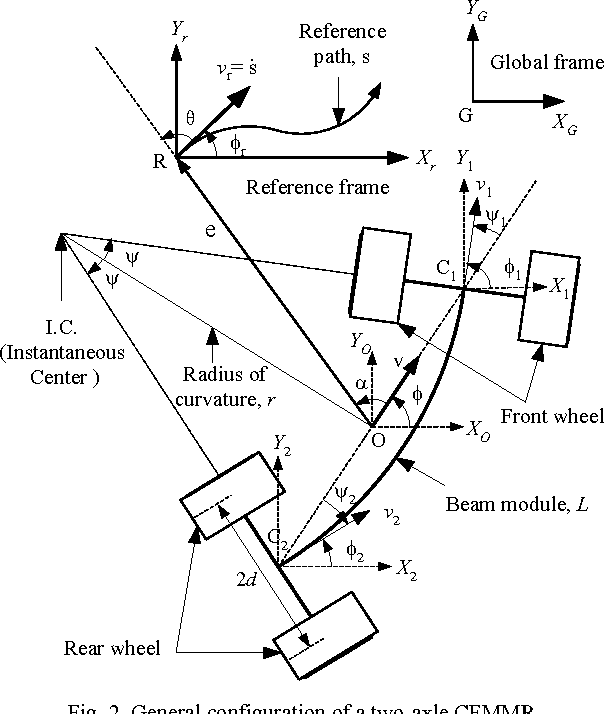
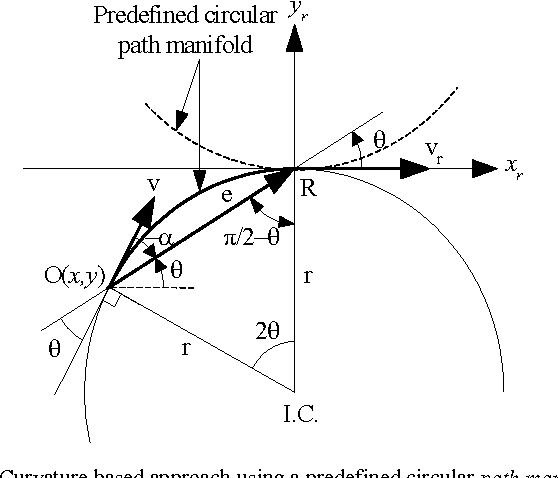
A novel motion control system for Compliant Framed wheeled Modular Mobile Robots (CFMMR) is studied in this paper. This type of wheeled mobile robot uses rigid axles coupled by compliant frame modules to provide both full suspension and enhanced steering capability without additional hardware. The proposed control system is developed by combining a bounded curvature-based kinematic controller and a nonlinear damping dynamic controller. In particular, multiple forms of controller interaction are examined. A twoaxle scout CFMMR configuration is used to evaluate the different control structures. Experimental results verify efficient motion control of posture regulation.
A New Hybrid Control Architecture to Attenuate Large Horizontal Wind Disturbance for a Small-Scale Unmanned Helicopter
May 03, 2019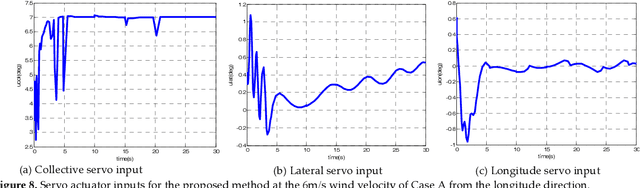
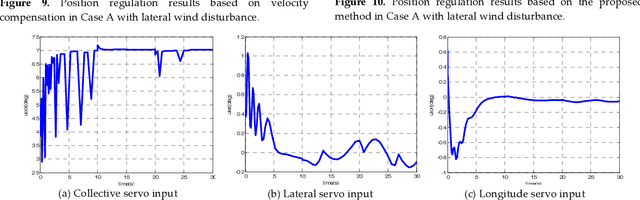
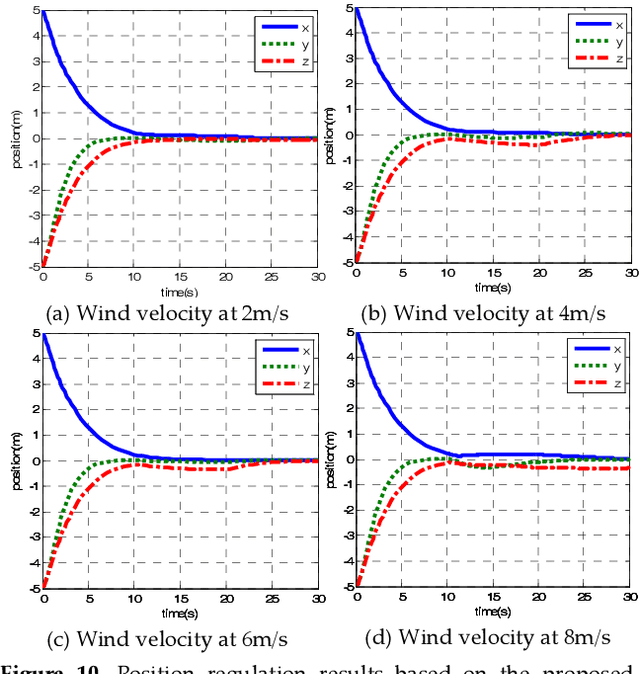
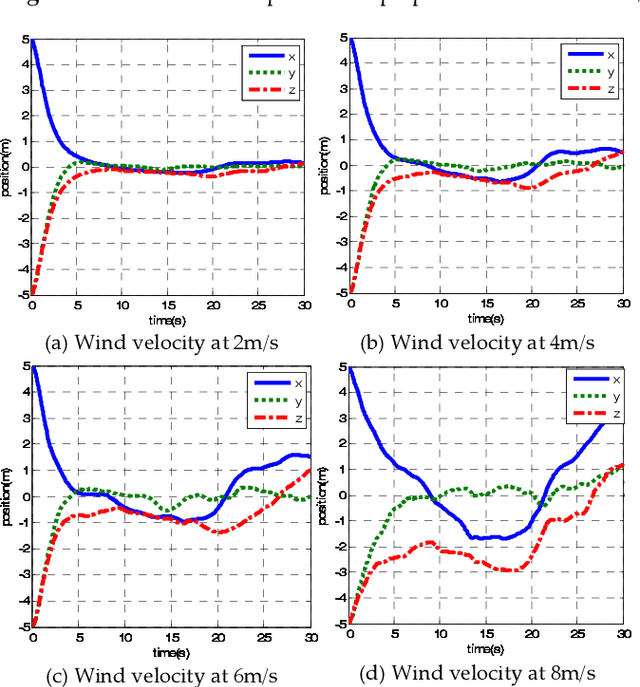
This paper presents a novel method to attenuate large horizontal wind disturbance for a small-scale unmanned autonomous helicopter combining wind tunnel-based experimental data and a backstepping algorithm. Large horizontal wind disturbance is harmful to autonomous helicopters, especially to small ones because of their low inertia and the high cross-coupling effects among the multiple inputs. In order to achieve more accurate and faster attenuation of large wind disturbance, a new hybrid control architecture is proposed to take advantage of the direct force/moment compensation based on the wind tunnel experimental data. In this architecture, large horizontal wind disturbance is treated as an additional input to the control system instead of a small perturbation around the equilibrium state. A backstepping algorithm is then designed to guarantee the stable convergence of the hilicopter to the desired position. The proposed technique is finally evaluated in simulation on the platform, HIROBO Eagle, compared with a traditional wind velocity compensation method.