 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpactful Robots: Evaluating Visual and Audio Warnings to Help Users Brace for Impact in Human Robot Interaction
Jul 28, 2022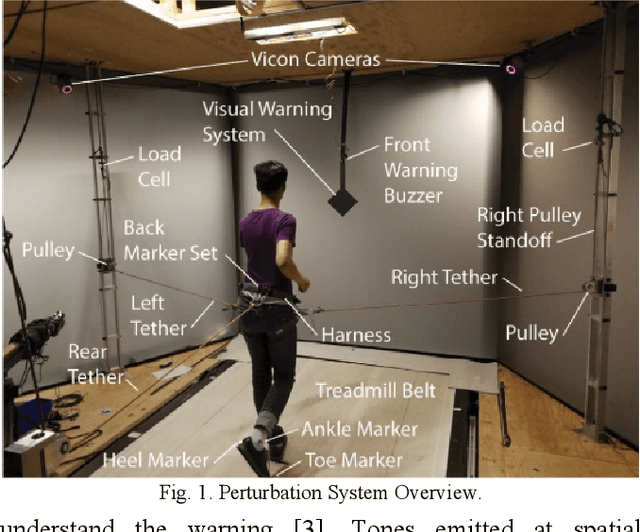

Wearable robotic devices have potential to assist and protect their users. Toward design of a Smart Helmet, this article examines the effectiveness of audio and visual warnings to help participants brace for impacts. A user study examines different warnings and impacts applied to users while running. Perturbation forces scaled to user mass are applied from different directions and user displacement is measured to characterize effectiveness of the warning. This is accomplished using the TreadPort Active Wind Tunnel adapted to deliver forward, rearward, right, or left perturbation forces at precise moments during the locomotor cycle. The article presents an overview of the system and demonstrates the ability to precisely deliver consistent warnings and perturbations during gait. User study results highlight effectiveness of visual and audio warnings to help users brace for impact, resulting in guidelines that will inform future human-robot warning systems.
The Effect of Sideslip on Jackknife Limits During Low Speed Trailer Operation
Jul 14, 2022



Jackknifing refers to the serious situation where a vehicle-trailer system enters a jackknife state and the vehicle and trailer eventually collide if trailer operation is not corrected. This paper considers low speed trailer maneuvering typical of trailer backing where jackknife state limits can vary due to sideslip caused by physical interaction between the vehicle, trailer, and environment. Analysis of a kinematic model considering sideslip at the vehicle and trailer wheels indicates that vehicle-trailer systems should be divided into three categories based on the ratio of hitch length and trailer tongue length, each with distinct behaviors. The Long Trailer category may have no jackknifing state while the other two categories always have states leading to jackknifing. It is found that jackknife limits, which are the boundaries between the jackknifing state and the recoverable regions, can be divided into safe and unsafe limits, the latter of which must be avoided. Simulations and physical experiments support these results and provide insight about the implications of vehicle and trailer states with slip that lead to jackknifing. Simulations also demonstrate the benefit of considering these new slip-based jackknife limits in trailer backing control.
Estimation of Soft Robotic Bladder Compression for Smart Helmets using IR Range Finding and Hall Effect Magnetic Sensing
Jul 13, 2022



This research focuses on soft robotic bladders that are used to monitor and control the interaction between a user's head and the shell of a Smart Helmet. Compression of these bladders determines impact dissipation; hence the focus of this paper is sensing and estimation of bladder compression. An IR rangefinder-based solution is evaluated using regression techniques as well as a Neural Network to estimate bladder compression. A Hall-Effect (HE) magnetic sensing system is also examined where HE sensors embedded in the base of the bladder sense the position of a magnet in the top of the bladder. The paper presents the HE sensor array, signal processing of HE voltage data, and then a Neural Network (NN) for predicting bladder compression. Efficacy of different training data sets on NN performance is studied. Different NN configurations are examined to determine a configuration that provides accurate estimates with as few nodes as possible. Different bladder compression profiles are evaluated to characterize IR range finding and HE based techniques in application scenarios.
Identification and Control of a Soft-Robotic Bladder Towards Impedance-Style Haptic Terrain Display
Jul 12, 2022



This paper evaluates the capabilities of a soft robotic pneumatic actuator derived from the terrain display haptic device, "The Smart Shoe." The bladder design of the Smart Shoe is upgraded to include a pressure supply and greater output flow capabilities. A bench top setup is created to rigorously test this new type of actuator. The bandwidth and stiffness capability of this new actuator are evaluated relative to forces and displacements encountered during human gait. Four force vs. displacement profiles relevant to haptic terrain display are proposed and tested using sliding-mode tracking control. It was found that the actuator could sustain a stiffness similar to a soft-soled shoe on concrete, as well as other terrain (sand, dirt, etc.), while the bandwidth of 7.3 Hz fell short of the goal bandwidth of 10 Hz. Compressions of the bladder done at 20 mm/s, which is similar to the speed of human gait, showed promising results in tracking a desired force trajectory. The results in this paper show this actuator is capable of displaying haptic terrain trajectories, providing a basis for futurep wearable haptic terrain display devices.
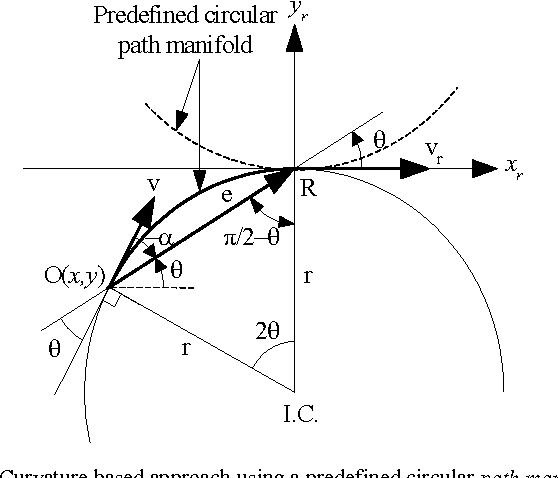
Integrating Vehicle Slip and Yaw in Overarching Multi-Tiered Automated Vehicle Steering Control to Balance Path Following Accuracy, Gracefulness, and Safety
Jul 12, 2022



Balancing path following accuracy and error convergence with graceful motion in steering control is challenging due to the competing nature of these requirements, especially across a range of operating speeds and conditions. This paper demonstrates that an integrated multi-tiered steering controller considering the impact of slip on kinematic control, dynamic control, and steering actuator rate commands achieves accurate and graceful path following. This work is founded on multi-tiered sideslip and yaw-based models, which allow derivation of controllers considering error due to sideslip and the mapping between steering commands and graceful lateral motion. Observer based sideslip estimates are combined with heading error in the kinematic controller to provide feedforward slip compensation. Path following error is compensated by a continuous Variable Structure Controller (VSC) using speed-based path manifolds to balance graceful motion and error convergence. Resulting yaw rate commands are used by a backstepping dynamic controller to generate steering rate commands. A High Gain Observer (HGO) estimates sideslip and yaw rate for output feedback control. Stability analysis of the output feedback controller is provided, and peaking is resolved. The work focuses on lateral control alone so that the steering controller can be combined with other speed controllers. Field results provide comparisons to related approaches demonstrating gracefulness and accuracy in different complex scenarios with varied weather conditions and perturbations.
Terrain Inclination Aided Three Dimensional Localization and Mapping for an Outdoor Mobile Robot
May 03, 2019
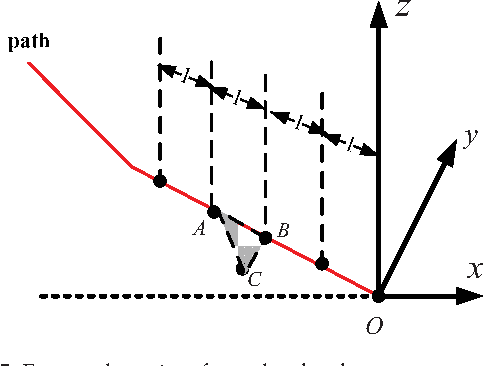
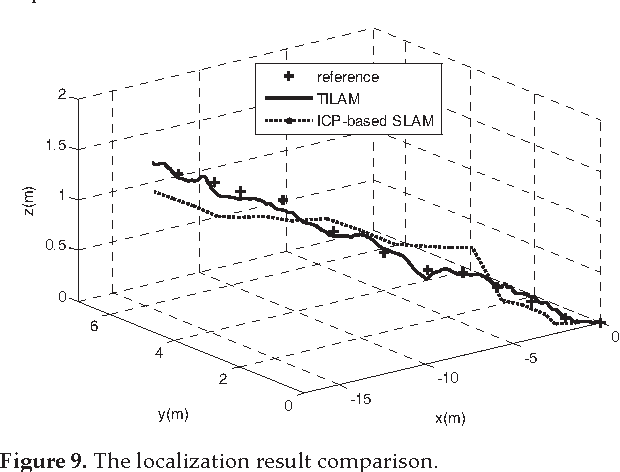
A new 3D localization and mapping techinque with terrain inclination assistance is proposed in this paper to allow a robot to identify its location and build a global map in an outdoor environment. The Iterative Closest Points (ICP) algorithm and terrain inclination-based localization are combined together to achieve accurate and fast localization and mapping. Inclinations of the terrains the robot navigates are used to achieve local localization during the interval between two laser scans. Using the results of the above localization as the initial condition, the ICP algorithm is then applied to align the overlapped laser scan maps to update the overhanging obstacles for building a global map of the surrounding area. Comprehensive experiments were carried out for the validation of the proposed 3D localization and mapping technique. The experimental results show that the proposed technique could reduce time consumption and improve the accuracy of the performance.
Cooperative Distributed Robust Control of Modular Mobile Robots with Bounded Curvature and Velocity
May 03, 2019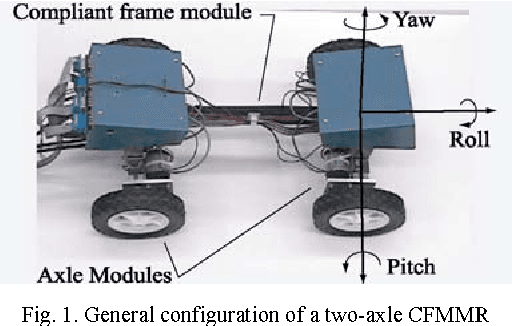

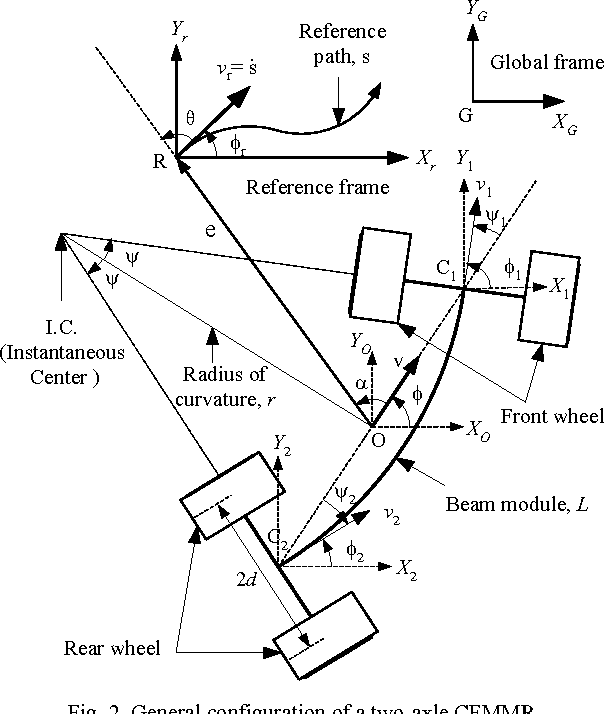
A novel motion control system for Compliant Framed wheeled Modular Mobile Robots (CFMMR) is studied in this paper. This type of wheeled mobile robot uses rigid axles coupled by compliant frame modules to provide both full suspension and enhanced steering capability without additional hardware. The proposed control system is developed by combining a bounded curvature-based kinematic controller and a nonlinear damping dynamic controller. In particular, multiple forms of controller interaction are examined. A twoaxle scout CFMMR configuration is used to evaluate the different control structures. Experimental results verify efficient motion control of posture regulation.