 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLK: Learning Humanoid Loco-Manipulation from Synthetic Interactions in Reconstructed Scenes
Jun 29, 2026Perception-based humanoid loco-manipulation requires connecting egocentric observations and task instructions to whole-body motion. Learning this mapping requires synchronized egocentric images, language commands, and robot-compatible kinematic trajectories, yet no existing data source provides this complete tuple at scale. We address this bottleneck by generating vision-language-kinematics (VLK) supervision synthetically in reconstructed scenes. Our pipeline leverages 3D Gaussian Splatting to reconstruct metric-scale indoor environments, synthesizes navigation and object-interaction trajectories using privileged scene information, and renders paired egocentric observations after the fact. We produce 48,000 paired trajectories with no human intervention and train a VLK policy that predicts short-horizon whole-body kinematic trajectories. A whole-body tracker converts these predictions into actions on the physical humanoid. We evaluate on the physical Unitree G1 performing navigation and single-object transport, demonstrating that synthesized interactions in reconstructed scenes provide effective supervision for sim-to-real perception-based humanoid loco-manipulation. Project Website: https://vision-language-kinematics.github.io/
Flow Policy Gradients for Robot Control
Feb 02, 2026Likelihood-based policy gradient methods are the dominant approach for training robot control policies from rewards. These methods rely on differentiable action likelihoods, which constrain policy outputs to simple distributions like Gaussians. In this work, we show how flow matching policy gradients -- a recent framework that bypasses likelihood computation -- can be made effective for training and fine-tuning more expressive policies in challenging robot control settings. We introduce an improved objective that enables success in legged locomotion, humanoid motion tracking, and manipulation tasks, as well as robust sim-to-real transfer on two humanoid robots. We then present ablations and analysis on training dynamics. Results show how policies can exploit the flow representation for exploration when training from scratch, as well as improved fine-tuning robustness over baselines.
BeyondMimic: From Motion Tracking to Versatile Humanoid Control via Guided Diffusion
Aug 13, 2025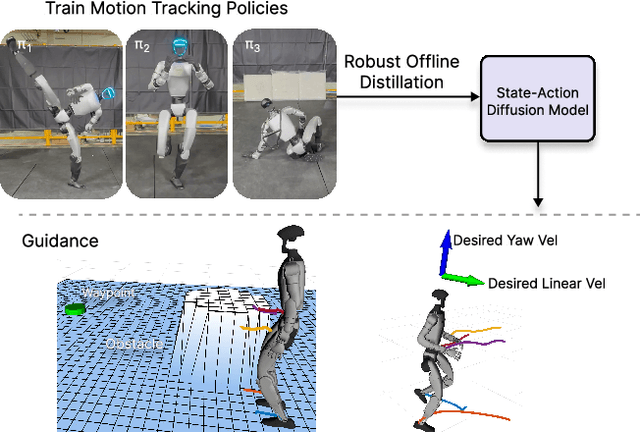
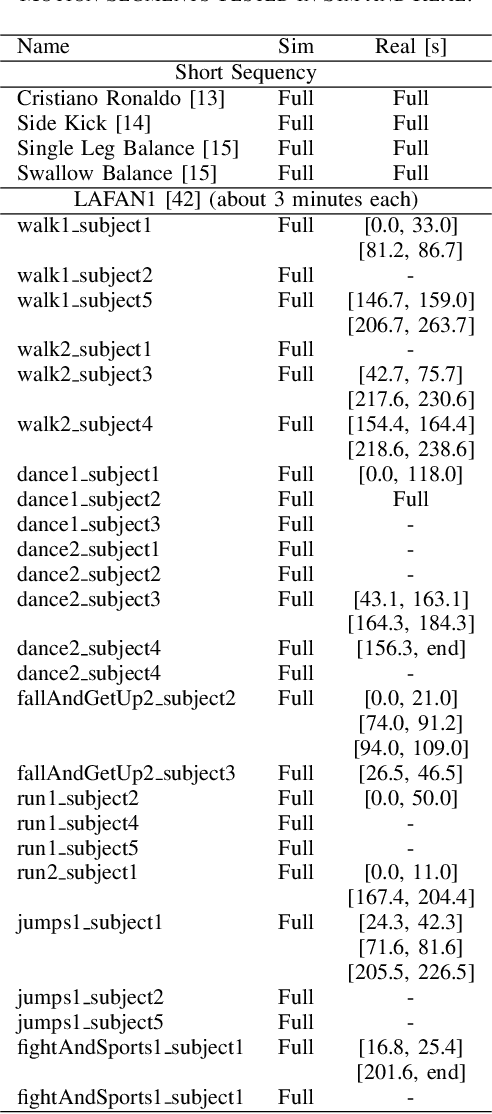
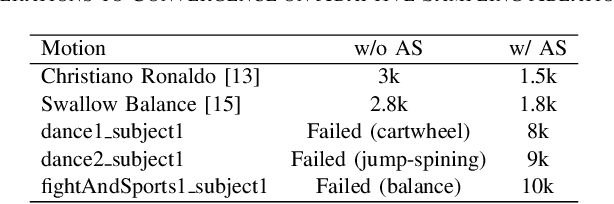
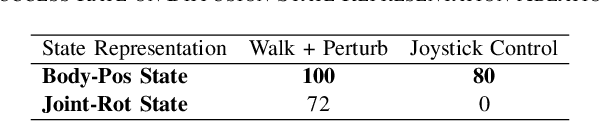
Learning skills from human motions offers a promising path toward generalizable policies for versatile humanoid whole-body control, yet two key cornerstones are missing: (1) a high-quality motion tracking framework that faithfully transforms large-scale kinematic references into robust and extremely dynamic motions on real hardware, and (2) a distillation approach that can effectively learn these motion primitives and compose them to solve downstream tasks. We address these gaps with BeyondMimic, a real-world framework to learn from human motions for versatile and naturalistic humanoid control via guided diffusion. Our framework provides a motion tracking pipeline capable of challenging skills such as jumping spins, sprinting, and cartwheels with state-of-the-art motion quality. Moving beyond simply mimicking existing motions, we further introduce a unified diffusion policy that enables zero-shot task-specific control at test time using simple cost functions. Deployed on hardware, BeyondMimic performs diverse tasks at test time, including waypoint navigation, joystick teleoperation, and obstacle avoidance, bridging sim-to-real motion tracking and flexible synthesis of human motion primitives for whole-body control. https://beyondmimic.github.io/.
PDP: Physics-Based Character Animation via Diffusion Policy
Jun 03, 2024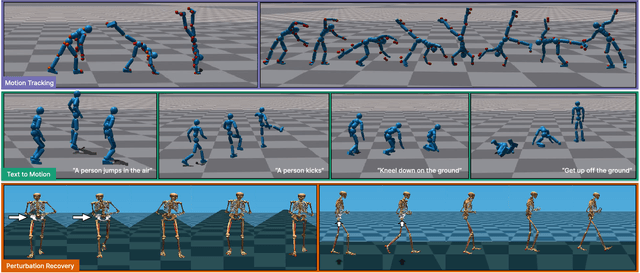
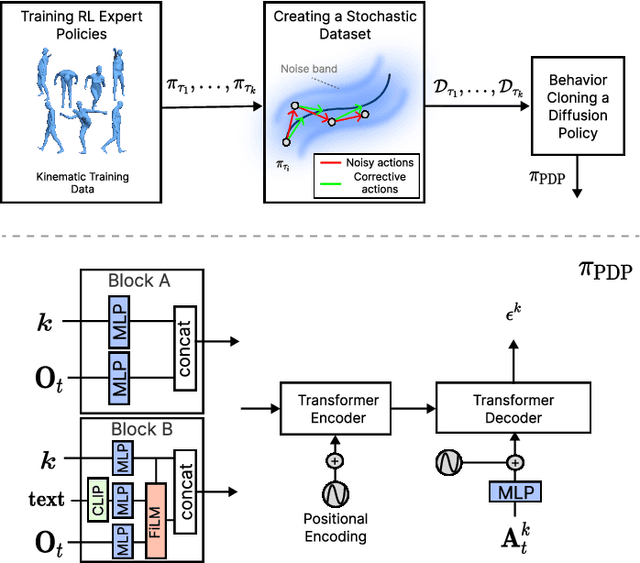
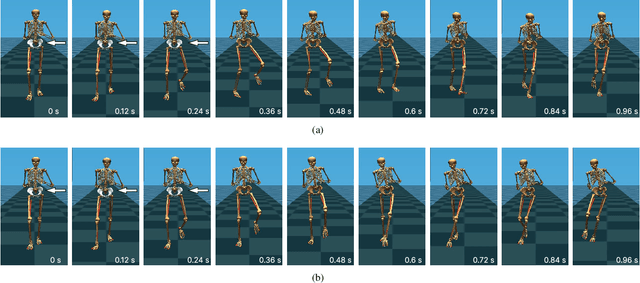

Generating diverse and realistic human motion that can physically interact with an environment remains a challenging research area in character animation. Meanwhile, diffusion-based methods, as proposed by the robotics community, have demonstrated the ability to capture highly diverse and multi-modal skills. However, naively training a diffusion policy often results in unstable motions for high-frequency, under-actuated control tasks like bipedal locomotion due to rapidly accumulating compounding errors, pushing the agent away from optimal training trajectories. The key idea lies in using RL policies not just for providing optimal trajectories but for providing corrective actions in sub-optimal states, giving the policy a chance to correct for errors caused by environmental stimulus, model errors, or numerical errors in simulation. Our method, Physics-Based Character Animation via Diffusion Policy (PDP), combines reinforcement learning (RL) and behavior cloning (BC) to create a robust diffusion policy for physics-based character animation. We demonstrate PDP on perturbation recovery, universal motion tracking, and physics-based text-to-motion synthesis.
Impactful Robots: Evaluating Visual and Audio Warnings to Help Users Brace for Impact in Human Robot Interaction
Jul 28, 2022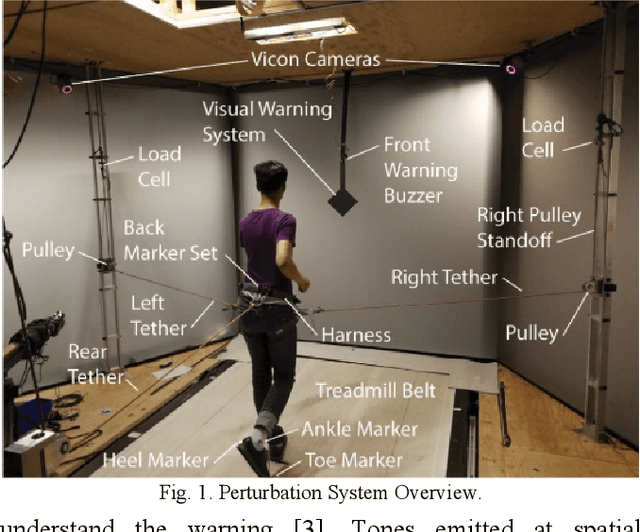
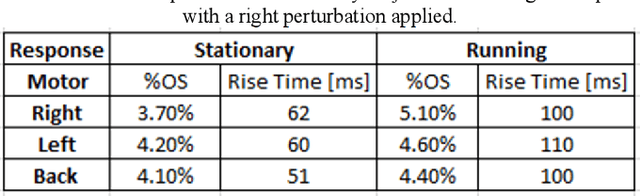
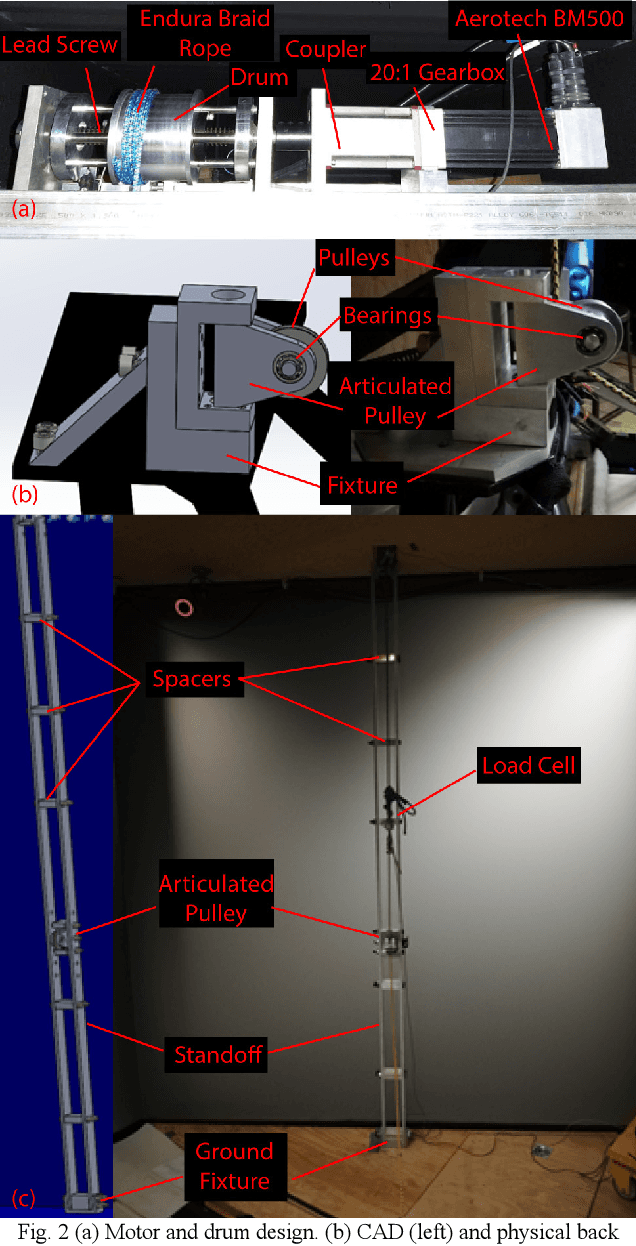

Wearable robotic devices have potential to assist and protect their users. Toward design of a Smart Helmet, this article examines the effectiveness of audio and visual warnings to help participants brace for impacts. A user study examines different warnings and impacts applied to users while running. Perturbation forces scaled to user mass are applied from different directions and user displacement is measured to characterize effectiveness of the warning. This is accomplished using the TreadPort Active Wind Tunnel adapted to deliver forward, rearward, right, or left perturbation forces at precise moments during the locomotor cycle. The article presents an overview of the system and demonstrates the ability to precisely deliver consistent warnings and perturbations during gait. User study results highlight effectiveness of visual and audio warnings to help users brace for impact, resulting in guidelines that will inform future human-robot warning systems.