 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDUPLEX: Agentic Dual-System Planning via LLM-Driven Information Extraction
Mar 25, 2026While Large Language Models (LLMs) provide semantic flexibility for robotic task planning, their susceptibility to hallucination and logical inconsistency limits their reliability in long-horizon domains. To bridge the gap between unstructured environments and rigorous plan synthesis, we propose DUPLEX, an agentic dual-system neuro-symbolic architecture that strictly confines the LLM to schema-guided information extraction rather than end-to-end planning or code generation. In our framework, a feed-forward Fast System utilizes a lightweight LLM to extract entities, relations etc. from natural language, deterministically mapping them into a Planning Domain Definition Language (PDDL) problem file for a classical symbolic planner. To resolve complex or underspecified scenarios, a Slow System is activated exclusively upon planning failure, leveraging solver diagnostics to drive a high-capacity LLM in iterative reflection and repair. Extensive evaluations across 12 classical and household planning domains demonstrate that DUPLEX significantly outperforms existing end-to-end and hybrid LLM baselines in both success rate and reliability. These results confirm that The key is not to make the LLM plan better, but to restrict the LLM to the part it is good at - structured semantic grounding - and leave logical plan synthesis to a symbolic planner.
EmergeNav: Structured Embodied Inference for Zero-Shot Vision-and-Language Navigation in Continuous Environments
Mar 16, 2026Zero-shot vision-and-language navigation in continuous environments (VLN-CE) remains challenging for modern vision-language models (VLMs). Although these models encode useful semantic priors, their open-ended reasoning does not directly translate into stable long-horizon embodied execution. We argue that the key bottleneck is not missing knowledge alone, but missing an execution structure for organizing instruction following, perceptual grounding, temporal progress, and stage verification. We propose EmergeNav, a zero-shot framework that formulates continuous VLN as structured embodied inference. EmergeNav combines a Plan--Solve--Transition hierarchy for stage-structured execution, GIPE for goal-conditioned perceptual extraction, contrastive dual-memory reasoning for progress grounding, and role-separated Dual-FOV sensing for time-aligned local control and boundary verification. On VLN-CE, EmergeNav achieves strong zero-shot performance using only open-source VLM backbones and no task-specific training, explicit maps, graph search, or waypoint predictors, reaching 30.00 SR with Qwen3-VL-8B and 37.00 SR with Qwen3-VL-32B. These results suggest that explicit execution structure is a key ingredient for turning VLM priors into stable embodied navigation behavior.
Hierarchical Dual-Change Collaborative Learning for UAV Scene Change Captioning
Mar 13, 2026This paper proposes a novel task for UAV scene understanding - UAV Scene Change Captioning (UAV-SCC) - which aims to generate natural language descriptions of semantic changes in dynamic aerial imagery captured from a movable viewpoint. Unlike traditional change captioning that mainly describes differences between image pairs captured from a fixed camera viewpoint over time, UAV scene change captioning focuses on image-pair differences resulting from both temporal and spatial scene variations dynamically captured by a moving camera. The key challenge lies in understanding viewpoint-induced scene changes from UAV image pairs that share only partially overlapping scene content due to viewpoint shifts caused by camera rotation, while effectively exploiting the relative orientation between the two images. To this end, we propose a Hierarchical Dual-Change Collaborative Learning (HDC-CL) method for UAV scene change captioning. In particular, a novel transformer, \emph{i.e.} Dynamic Adaptive Layout Transformer (DALT) is designed to adaptively model diverse spatial layouts of the image pair, where the interrelated features derived from the overlapping and non-overlapping regions are learned within the flexible and unified encoding layer. Furthermore, we propose a Hierarchical Cross-modal Orientation Consistency Calibration (HCM-OCC) method to enhance the model's sensitivity to viewpoint shift directions, enabling more accurate change captioning. To facilitate in-depth research on this task, we construct a new benchmark dataset, named UAV-SCC dataset, for UAV scene change captioning. Extensive experiments demonstrate that the proposed method achieves state-of-the-art performance on this task. The dataset and code will be publicly released upon acceptance of this paper.
PM-Nav: Priori-Map Guided Embodied Navigation in Functional Buildings
Mar 10, 2026Existing language-driven embodied navigation paradigms face challenges in functional buildings (FBs) with highly similar features, as they lack the ability to effectively utilize priori spatial knowledge. To tackle this issue, we propose a Priori-Map Guided Embodied Navigation (PM-Nav), wherein environmental maps are transformed into navigation-friendly semantic priori-maps, a hierarchical chain-of-thought prompt template with an annotation priori-map is designed to enable precise path planning, and a multi-model collaborative action output mechanism is built to accomplish positioning decisions and execution control for navigation planning. Comprehensive tests using a home-made FB dataset show that the PM-Nav obtains average improvements of 511\% and 1175\%, and 650\% and 400\% over the SG-Nav and the InstructNav in simulation and real-world, respectively. These tremendous boosts elucidate the great potential of using the PM-Nav as a backbone navigation framework for FBs.
ViSA-Enhanced Aerial VLN: A Visual-Spatial Reasoning Enhanced Framework for Aerial Vision-Language Navigation
Mar 09, 2026Existing aerial Vision-Language Navigation (VLN) methods predominantly adopt a detection-and-planning pipeline, which converts open-vocabulary detections into discrete textual scene graphs. These approaches are plagued by inadequate spatial reasoning capabilities and inherent linguistic ambiguities. To address these bottlenecks, we propose a Visual-Spatial Reasoning (ViSA) enhanced framework for aerial VLN. Specifically, a triple-phase collaborative architecture is designed to leverage structured visual prompting, enabling Vision-Language Models (VLMs) to perform direct reasoning on image planes without the need for additional training or complex intermediate representations. Comprehensive evaluations on the CityNav benchmark demonstrate that the ViSA-enhanced VLN achieves a 70.3\% improvement in success rate compared to the fully trained state-of-the-art (SOTA) method, elucidating its great potential as a backbone for aerial VLN systems.
CMMR-VLN: Vision-and-Language Navigation via Continual Multimodal Memory Retrieval
Mar 09, 2026Although large language models (LLMs) are introduced into vision-and-language navigation (VLN) to improve instruction comprehension and generalization, existing LLM- based VLN lacks the ability to selectively recall and use relevant priori experiences to help navigation tasks, limiting their performance in long-horizon and unfamiliar scenarios. In this work, we propose CMMR-VLN (Continual Multimodal Memory Retrieval based VLN), a VLN framework that endows LLM agents with structured memory and reflection capabilities. Specifically, the CMMR-VLN constructs a multimodal experi- ence memory indexed by panoramic visual images and salient landmarks to retrieve relevant experiences during navigation, introduces a retrieved-augmented generation pipeline to mimick how experienced human navigators leverage priori knowledge, and incorporates a reflection-based memory update strategy that selectively stores complete successful paths and the key initial mistake in failure cases. Comprehensive tests illustrate average success rate improvements of 52.9%, 20.9% and 20.9%, and 200%, 50% and 50% over the NavGPT, the MapGPT, and the DiscussNav in simulation and real tests, respectively eluci- dating the great potential of the CMMR-VLN as a backbone VLN framework.
Mean-Flow based One-Step Vision-Language-Action
Mar 02, 2026Recent advances in FlowMatching-based Vision-Language-Action (VLA) frameworks have demonstrated remarkable advantages in generating high-frequency action chunks, particularly for highly dexterous robotic manipulation tasks. Despite these notable achievements, their practical applications are constrained by prolonged generation latency, which stems from inherent iterative sampling requirements and architectural limitations. To address this critical bottleneck, we propose a Mean-Flow based One-Step VLA approach. Specifically, we resolve the noise-induced issues in the action generation process, thereby eliminating the consistency constraints inherent to conventional Flow-Matching methods. This significantly enhances generation efficiency and enables one-step action generation. Real-world robotic experiments show that the generation speed of the proposed Mean-Flow based One-Step VLA is 8.7 times and 83.9 times faster than that of SmolVLA and Diffusion Policy, respectively. These results elucidate its great potential as a high-efficiency backbone for VLA-based robotic manipulation.
SE-VLN: A Self-Evolving Vision-Language Navigation Framework Based on Multimodal Large Language Models
Jul 17, 2025Recent advances in vision-language navigation (VLN) were mainly attributed to emerging large language models (LLMs). These methods exhibited excellent generalization capabilities in instruction understanding and task reasoning. However, they were constrained by the fixed knowledge bases and reasoning abilities of LLMs, preventing fully incorporating experiential knowledge and thus resulting in a lack of efficient evolutionary capacity. To address this, we drew inspiration from the evolution capabilities of natural agents, and proposed a self-evolving VLN framework (SE-VLN) to endow VLN agents with the ability to continuously evolve during testing. To the best of our knowledge, it was the first time that an multimodal LLM-powered self-evolving VLN framework was proposed. Specifically, SE-VLN comprised three core modules, i.e., a hierarchical memory module to transfer successful and failure cases into reusable knowledge, a retrieval-augmented thought-based reasoning module to retrieve experience and enable multi-step decision-making, and a reflection module to realize continual evolution. Comprehensive tests illustrated that the SE-VLN achieved navigation success rates of 57% and 35.2% in unseen environments, representing absolute performance improvements of 23.9% and 15.0% over current state-of-the-art methods on R2R and REVERSE datasets, respectively. Moreover, the SE-VLN showed performance improvement with increasing experience repository, elucidating its great potential as a self-evolving agent framework for VLN.
Subconscious Robotic Imitation Learning
Dec 29, 2024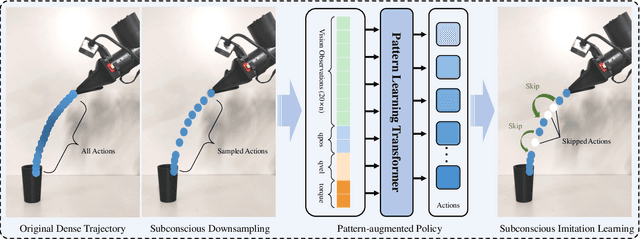
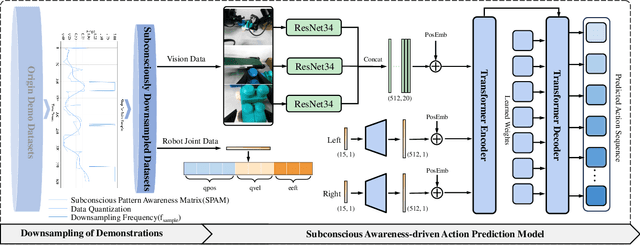
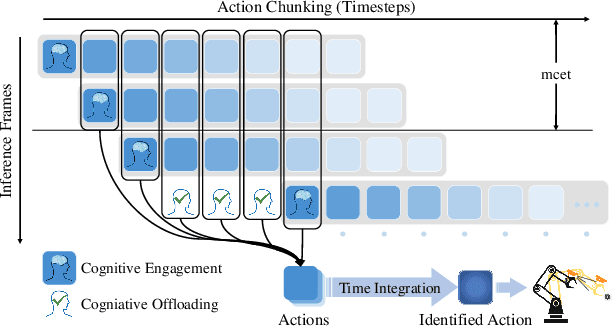
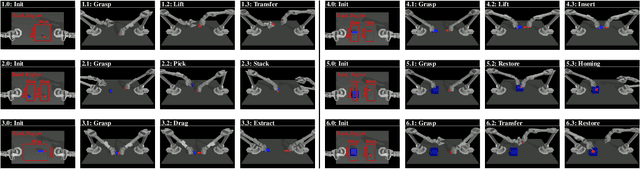
Although robotic imitation learning (RIL) is promising for embodied intelligent robots, existing RIL approaches rely on computationally intensive multi-model trajectory predictions, resulting in slow execution and limited real-time responsiveness. Instead, human beings subconscious can constantly process and store vast amounts of information from their experiences, perceptions, and learning, allowing them to fulfill complex actions such as riding a bike, without consciously thinking about each. Inspired by this phenomenon in action neurology, we introduced subconscious robotic imitation learning (SRIL), wherein cognitive offloading was combined with historical action chunkings to reduce delays caused by model inferences, thereby accelerating task execution. This process was further enhanced by subconscious downsampling and pattern augmented learning policy wherein intent-rich information was addressed with quantized sampling techniques to improve manipulation efficiency. Experimental results demonstrated that execution speeds of the SRIL were 100\% to 200\% faster over SOTA policies for comprehensive dual-arm tasks, with consistently higher success rates.
Constrained Behavior Cloning for Robotic Learning
Aug 20, 2024



Behavior cloning (BC) is a popular supervised imitation learning method in the societies of robotics, autonomous driving, etc., wherein complex skills can be learned by direct imitation from expert demonstrations. Despite its rapid development, it is still affected by limited field of view where accumulation of sensors and joint noise bring compounding errors. In this paper, we introduced geometrically and historically constrained behavior cloning (GHCBC) to dominantly consider high-level state information inspired by neuroscientists, wherein the geometrically constrained behavior cloning were used to geometrically constrain predicting poses, and the historically constrained behavior cloning were utilized to temporally constrain action sequences. The synergy between these two types of constrains enhanced the BC performance in terms of robustness and stability. Comprehensive experimental results showed that success rates were improved by 29.73% in simulation and 39.4% in real robot experiments in average, respectively, compared to state-of-the-art BC method, especially in long-term operational scenes, indicating great potential of using the GHCBC for robotic learning.