 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSubconscious Robotic Imitation Learning
Dec 29, 2024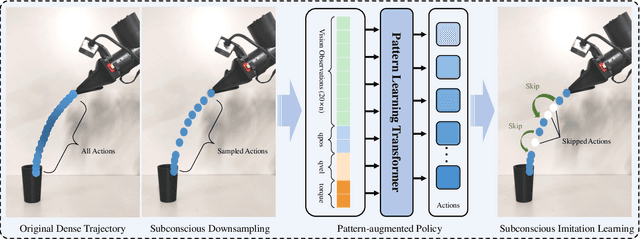
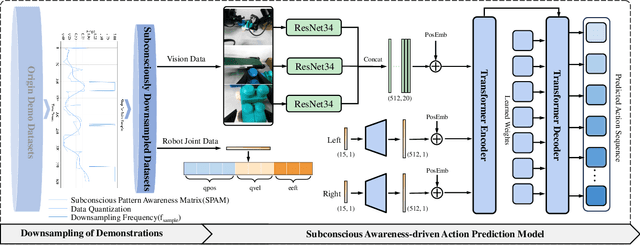
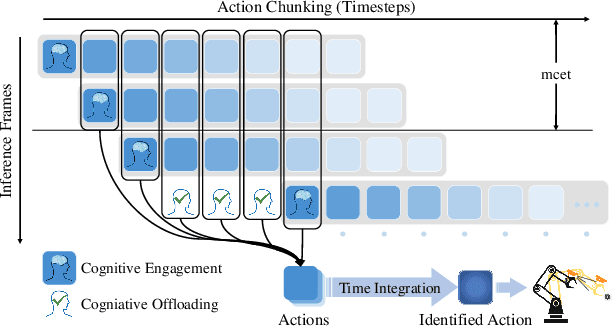
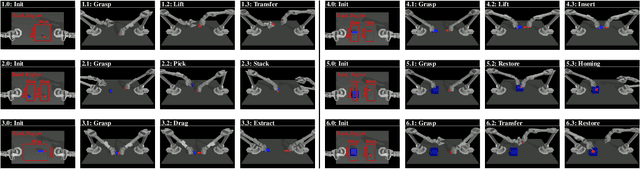
Although robotic imitation learning (RIL) is promising for embodied intelligent robots, existing RIL approaches rely on computationally intensive multi-model trajectory predictions, resulting in slow execution and limited real-time responsiveness. Instead, human beings subconscious can constantly process and store vast amounts of information from their experiences, perceptions, and learning, allowing them to fulfill complex actions such as riding a bike, without consciously thinking about each. Inspired by this phenomenon in action neurology, we introduced subconscious robotic imitation learning (SRIL), wherein cognitive offloading was combined with historical action chunkings to reduce delays caused by model inferences, thereby accelerating task execution. This process was further enhanced by subconscious downsampling and pattern augmented learning policy wherein intent-rich information was addressed with quantized sampling techniques to improve manipulation efficiency. Experimental results demonstrated that execution speeds of the SRIL were 100\% to 200\% faster over SOTA policies for comprehensive dual-arm tasks, with consistently higher success rates.
Constrained Behavior Cloning for Robotic Learning
Aug 20, 2024



Behavior cloning (BC) is a popular supervised imitation learning method in the societies of robotics, autonomous driving, etc., wherein complex skills can be learned by direct imitation from expert demonstrations. Despite its rapid development, it is still affected by limited field of view where accumulation of sensors and joint noise bring compounding errors. In this paper, we introduced geometrically and historically constrained behavior cloning (GHCBC) to dominantly consider high-level state information inspired by neuroscientists, wherein the geometrically constrained behavior cloning were used to geometrically constrain predicting poses, and the historically constrained behavior cloning were utilized to temporally constrain action sequences. The synergy between these two types of constrains enhanced the BC performance in terms of robustness and stability. Comprehensive experimental results showed that success rates were improved by 29.73% in simulation and 39.4% in real robot experiments in average, respectively, compared to state-of-the-art BC method, especially in long-term operational scenes, indicating great potential of using the GHCBC for robotic learning.