 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSGIDN-LCD: An Appearance-based Loop Closure Detection Algorithm using Superpixel Grids and Incremental Dynamic Nodes
Apr 08, 2023Loop Closure Detection (LCD) is an essential component of visual simultaneous localization and mapping (SLAM) systems. It enables the recognition of previously visited scenes to eliminate pose and map estimate drifts arising from long-term exploration. However, current appearance-based LCD methods face significant challenges, including high computational costs, viewpoint variance, and dynamic objects in scenes. This paper introduces an online based on Superpixel Grids (SGs) LCD approach, SGIDN-LCD, to find similarities between scenes via hand-crafted features extracted from SGs. Unlike traditional Bag-of-Words (BoW) models requiring pre-training, we propose an adaptive mechanism to group similar images called $\textbf{\textit{dynamic}}$ $\textbf{\textit{node}}$, which incremental adjusts the database in an online manner, allowing for efficient retrieval of previously viewed images. Experimental results demonstrate the SGIDN-LCD significantly improving LCD precision-recall and efficiency. Moreover, our proposed overall LCD method outperforms state-of-the-art approaches on multiple typical datasets.
DynPL-SVO: A New Method Using Point and Line Features for Stereo Visual Odometry in Dynamic Scenes
May 17, 2022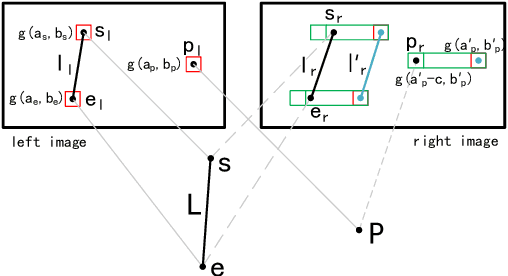
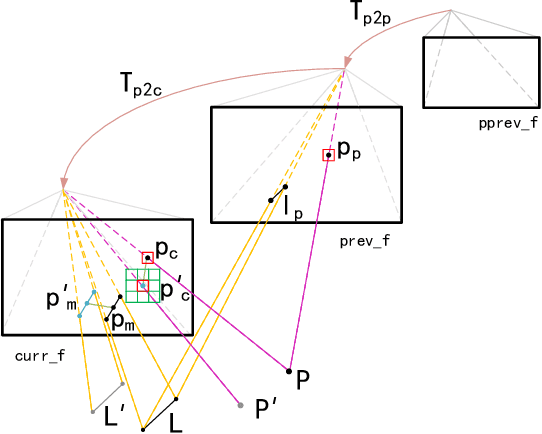
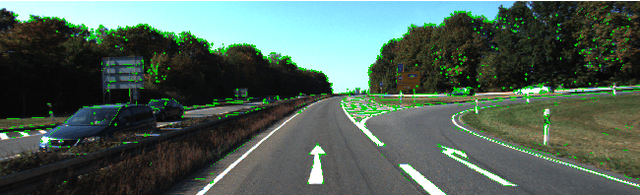
Stereo visual odometry is widely used where a robot tracks its position and orientation using stereo cameras. Most of the approaches recovered mobile robotics motion based on the matching and tracking of point features along a sequence of stereo images. But in low-textured and dynamic scenes, there are no sufficient robust static point features for motion estimation, causing lots of previous work to fail to reconstruct the robotic motion. However, line features can be detected in such low-textured and dynamic scenes. In this paper, we proposed DynPL-SVO, a stereo visual odometry with the $dynamic$ $grid$ algorithm and the cost function containing both vertical and horizontal information of the line features. Stereo camera motion was obtained through Levenberg-Marquard minimization of re-projection error of point and line features. The experimental results on the KITTI and EuRoC MAV datasets showed that the DynPL-SVO had a competitive performance when compared to other state-of-the-art systems by producing more robust and accurate motion estimation, especially in low-textured and dynamic scenes.