 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoCLINT: The Winning Method in AutoCV Challenge 2019
May 09, 2020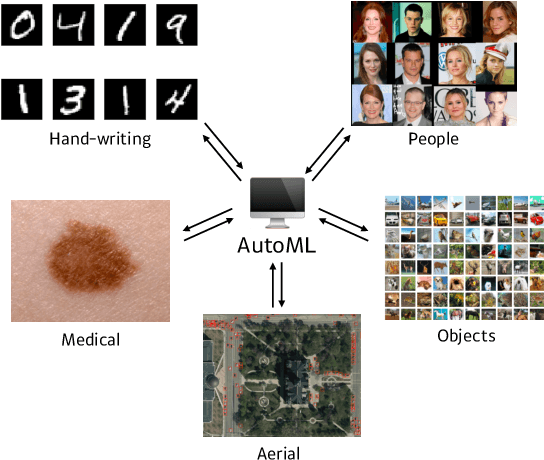
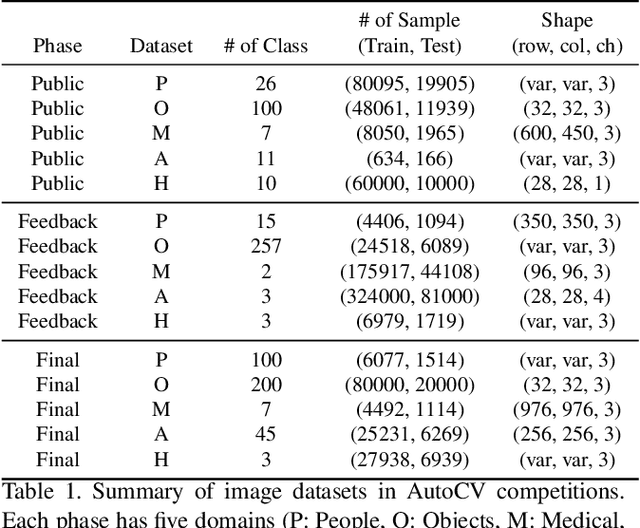
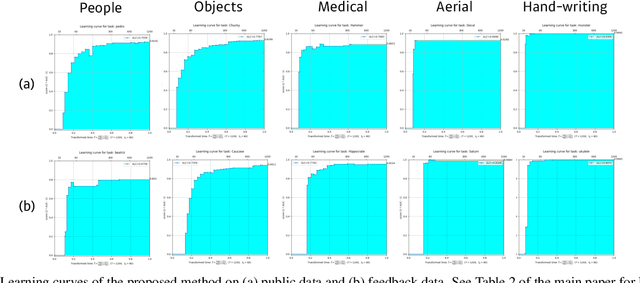

NeurIPS 2019 AutoDL challenge is a series of six automated machine learning competitions. Particularly, AutoCV challenges mainly focused on classification tasks on visual domain. In this paper, we introduce the winning method in the competition, AutoCLINT. The proposed method implements an autonomous training strategy, including efficient code optimization, and applies an automated data augmentation to achieve the fast adaptation of pretrained networks. We implement a light version of Fast AutoAugment to search for data augmentation policies efficiently for the arbitrarily given image domains. We also empirically analyze the components of the proposed method and provide ablation studies focusing on AutoCV datasets.
torchgpipe: On-the-fly Pipeline Parallelism for Training Giant Models
Apr 21, 2020

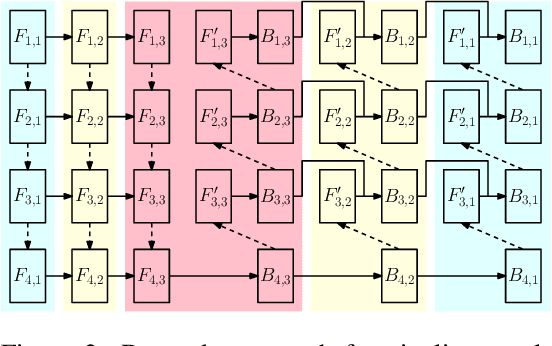
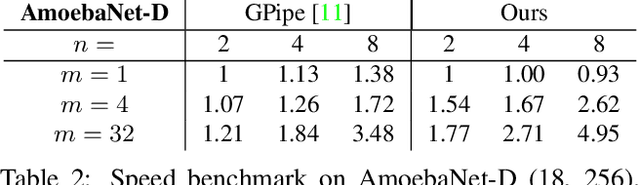
We design and implement a ready-to-use library in PyTorch for performing micro-batch pipeline parallelism with checkpointing proposed by GPipe (Huang et al., 2019). In particular, we develop a set of design components to enable pipeline-parallel gradient computation in PyTorch's define-by-run and eager execution environment. We show that each component is necessary to fully benefit from pipeline parallelism in such environment, and demonstrate the efficiency of the library by applying it to various network architectures including AmoebaNet-D and U-Net. Our library is available at https://github.com/kakaobrain/torchgpipe .
Spatially Attentive Output Layer for Image Classification
Apr 16, 2020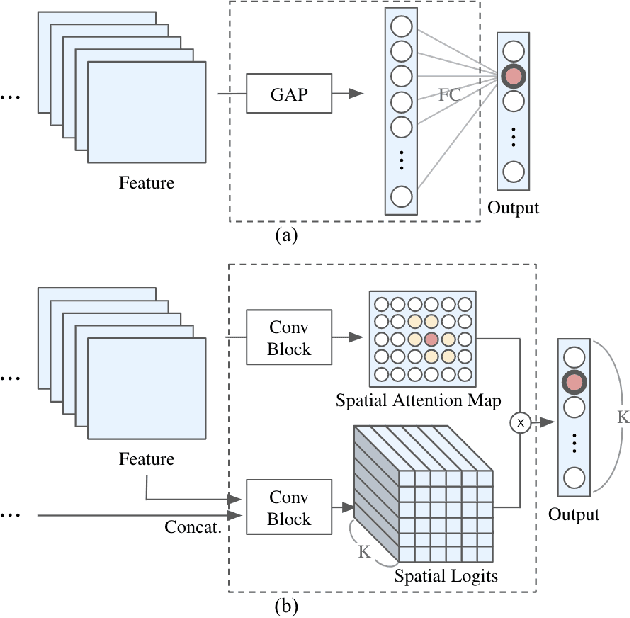
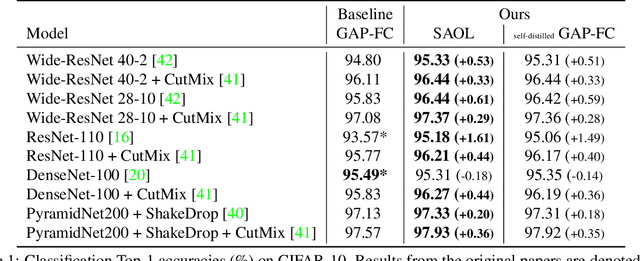
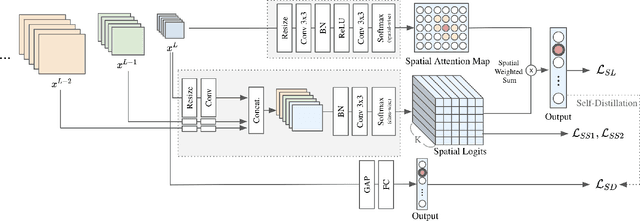
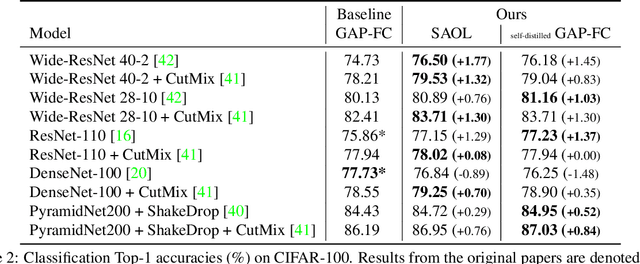
Most convolutional neural networks (CNNs) for image classification use a global average pooling (GAP) followed by a fully-connected (FC) layer for output logits. However, this spatial aggregation procedure inherently restricts the utilization of location-specific information at the output layer, although this spatial information can be beneficial for classification. In this paper, we propose a novel spatial output layer on top of the existing convolutional feature maps to explicitly exploit the location-specific output information. In specific, given the spatial feature maps, we replace the previous GAP-FC layer with a spatially attentive output layer (SAOL) by employing a attention mask on spatial logits. The proposed location-specific attention selectively aggregates spatial logits within a target region, which leads to not only the performance improvement but also spatially interpretable outputs. Moreover, the proposed SAOL also permits to fully exploit location-specific self-supervision as well as self-distillation to enhance the generalization ability during training. The proposed SAOL with self-supervision and self-distillation can be easily plugged into existing CNNs. Experimental results on various classification tasks with representative architectures show consistent performance improvements by SAOL at almost the same computational cost.
Scalable Neural Architecture Search for 3D Medical Image Segmentation
Jun 13, 2019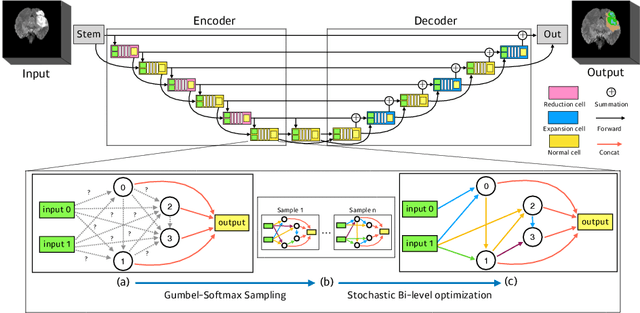
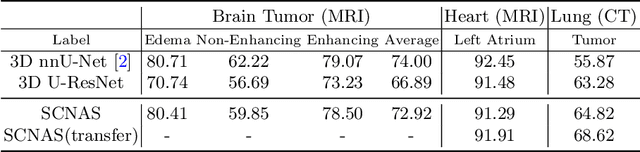
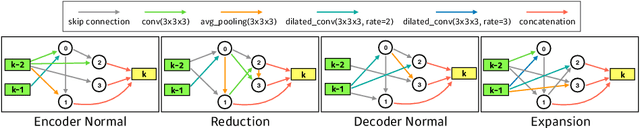
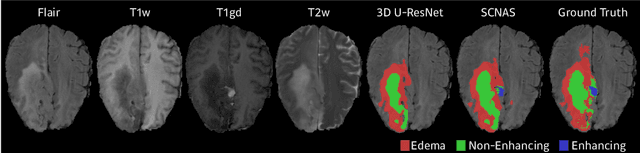
In this paper, a neural architecture search (NAS) framework is proposed for 3D medical image segmentation, to automatically optimize a neural architecture from a large design space. Our NAS framework searches the structure of each layer including neural connectivities and operation types in both of the encoder and decoder. Since optimizing over a large discrete architecture space is difficult due to high-resolution 3D medical images, a novel stochastic sampling algorithm based on a continuous relaxation is also proposed for scalable gradient based optimization. On the 3D medical image segmentation tasks with a benchmark dataset, an automatically designed architecture by the proposed NAS framework outperforms the human-designed 3D U-Net, and moreover this optimized architecture is well suited to be transferred for different tasks.