 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFederated Learning Enables Big Data for Rare Cancer Boundary Detection
Apr 25, 2022Although machine learning (ML) has shown promise in numerous domains, there are concerns about generalizability to out-of-sample data. This is currently addressed by centrally sharing ample, and importantly diverse, data from multiple sites. However, such centralization is challenging to scale (or even not feasible) due to various limitations. Federated ML (FL) provides an alternative to train accurate and generalizable ML models, by only sharing numerical model updates. Here we present findings from the largest FL study to-date, involving data from 71 healthcare institutions across 6 continents, to generate an automatic tumor boundary detector for the rare disease of glioblastoma, utilizing the largest dataset of such patients ever used in the literature (25,256 MRI scans from 6,314 patients). We demonstrate a 33% improvement over a publicly trained model to delineate the surgically targetable tumor, and 23% improvement over the tumor's entire extent. We anticipate our study to: 1) enable more studies in healthcare informed by large and diverse data, ensuring meaningful results for rare diseases and underrepresented populations, 2) facilitate further quantitative analyses for glioblastoma via performance optimization of our consensus model for eventual public release, and 3) demonstrate the effectiveness of FL at such scale and task complexity as a paradigm shift for multi-site collaborations, alleviating the need for data sharing.
Design of an Affordable Prosthetic Arm Equipped with Deep Learning Vision-Based Manipulation
Mar 03, 2021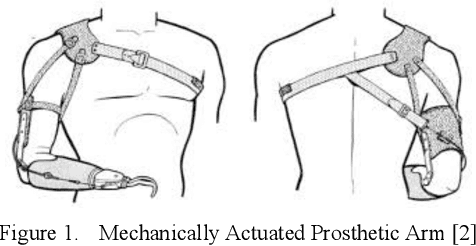
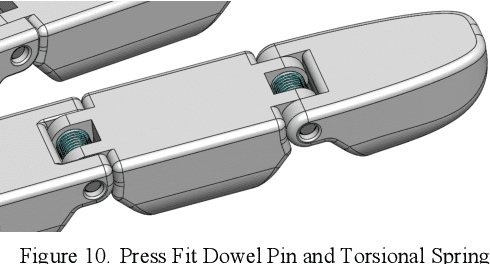
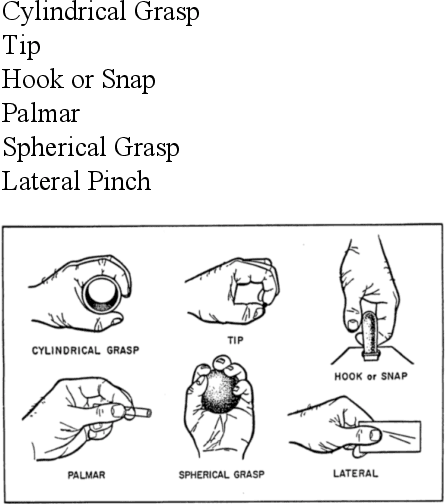

Many amputees throughout the world are left with limited options to personally own a prosthetic arm due to the expensive cost, mechanical system complexity, and lack of availability. The three main control methods of prosthetic hands are: (1) body-powered control, (2) extrinsic mechanical control, and (3) myoelectric control. These methods can perform well under a controlled situation but will often break down in clinical and everyday use due to poor robustness, weak adaptability, long-term training, and heavy mental burden during use. This paper lays the complete outline of the design process of an affordable and easily accessible novel prosthetic arm that reduces the cost of prosthetics from $10,000 to $700 on average. The 3D printed prosthetic arm is equipped with a depth camera and closed-loop off-policy deep learning algorithm to help form grasps to the object in view. Current work in reinforcement learning masters only individual skills and is heavily focused on parallel jaw grippers for in-hand manipulation. In order to create generalization, which better performs real-world manipulation, the focus is specifically on using the general framework of Markov Decision Process (MDP) through scalable learning with off-policy algorithms such as deep deterministic policy gradient (DDPG) and to study this question in the context of grasping a prosthetic arm. We were able to achieve a 78% grasp success rate on previously unseen objects and generalize across multiple objects for manipulation tasks. This work will make prosthetics cheaper, easier to use and accessible globally for amputees. Future work includes applying similar approaches to other medical assistive devices where a human is interacting with a machine to complete a task.