 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMDBench: A Synthetic Multi-Document Reasoning Benchmark Generated with Knowledge Guidance
Jun 17, 2025

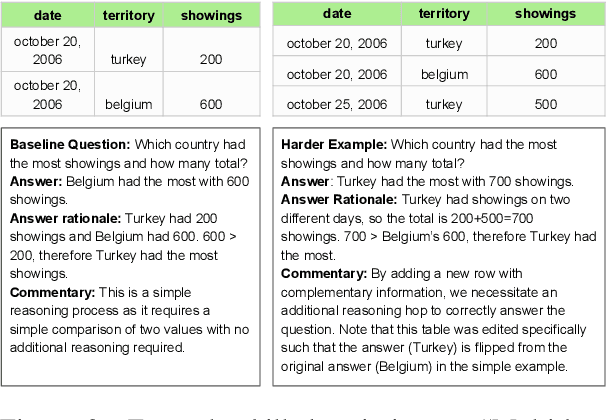

Natural language processing evaluation has made significant progress, largely driven by the proliferation of powerful large language mod-els (LLMs). New evaluation benchmarks are of increasing priority as the reasoning capabilities of LLMs are expanding at a rapid pace. In particular, while multi-document (MD) reasoning is an area of extreme relevance given LLM capabilities in handling longer-context inputs, few benchmarks exist to rigorously examine model behavior in this setting. Moreover, the multi-document setting is historically challenging for benchmark creation due to the expensive cost of annotating long inputs. In this work, we introduce MDBench, a new dataset for evaluating LLMs on the task of multi-document reasoning. Notably, MDBench is created through a novel synthetic generation process, allowing us to controllably and efficiently generate challenging document sets and the corresponding question-answer (QA) examples. Our novel technique operates on condensed structured seed knowledge, modifying it through LLM-assisted edits to induce MD-specific reasoning challenges. We then convert this structured knowledge into a natural text surface form, generating a document set and corresponding QA example. We analyze the behavior of popular LLMs and prompting techniques, finding that MDBENCH poses significant challenges for all methods, even with relatively short document sets. We also see our knowledge-guided generation technique (1) allows us to readily perform targeted analysis of MD-specific reasoning capabilities and (2) can be adapted quickly to account for new challenges and future modeling improvements.
Redundant Queries in DETR-Based 3D Detection Methods: Unnecessary and Prunable
Dec 03, 2024



Query-based models are extensively used in 3D object detection tasks, with a wide range of pre-trained checkpoints readily available online. However, despite their popularity, these models often require an excessive number of object queries, far surpassing the actual number of objects to detect. The redundant queries result in unnecessary computational and memory costs. In this paper, we find that not all queries contribute equally -- a significant portion of queries have a much smaller impact compared to others. Based on this observation, we propose an embarrassingly simple approach called \bd{G}radually \bd{P}runing \bd{Q}ueries (GPQ), which prunes queries incrementally based on their classification scores. It is straightforward to implement in any query-based method, as it can be seamlessly integrated as a fine-tuning step using an existing checkpoint after training. With GPQ, users can easily generate multiple models with fewer queries, starting from a checkpoint with an excessive number of queries. Experiments on various advanced 3D detectors show that GPQ effectively reduces redundant queries while maintaining performance. Using our method, model inference on desktop GPUs can be accelerated by up to 1.31x. Moreover, after deployment on edge devices, it achieves up to a 67.86\% reduction in FLOPs and a 76.38\% decrease in inference time. The code will be available at \url{https://github.com/iseri27/Gpq}.
HeightMapNet: Explicit Height Modeling for End-to-End HD Map Learning
Nov 03, 2024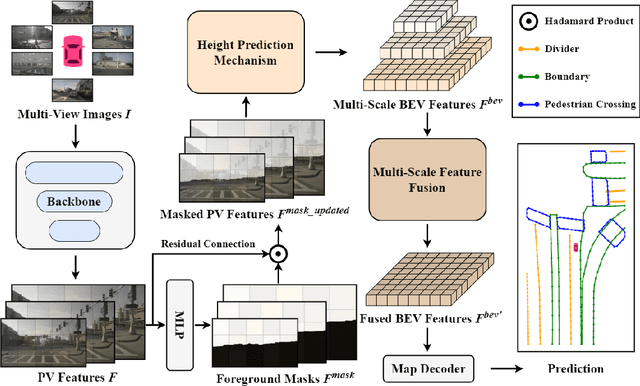

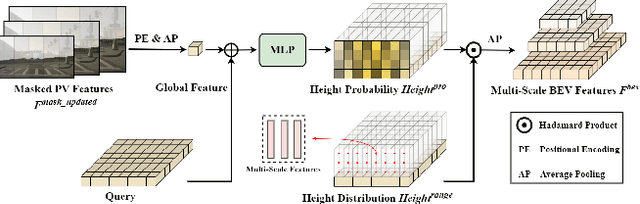

Recent advances in high-definition (HD) map construction from surround-view images have highlighted their cost-effectiveness in deployment. However, prevailing techniques often fall short in accurately extracting and utilizing road features, as well as in the implementation of view transformation. In response, we introduce HeightMapNet, a novel framework that establishes a dynamic relationship between image features and road surface height distributions. By integrating height priors, our approach refines the accuracy of Bird's-Eye-View (BEV) features beyond conventional methods. HeightMapNet also introduces a foreground-background separation network that sharply distinguishes between critical road elements and extraneous background components, enabling precise focus on detailed road micro-features. Additionally, our method leverages multi-scale features within the BEV space, optimally utilizing spatial geometric information to boost model performance. HeightMapNet has shown exceptional results on the challenging nuScenes and Argoverse 2 datasets, outperforming several widely recognized approaches. The code will be available at \url{https://github.com/adasfag/HeightMapNet/}.
PELMS: Pre-training for Effective Low-Shot Multi-Document Summarization
Nov 16, 2023



We investigate pre-training techniques for abstractive multi-document summarization (MDS), which is much less studied than summarizing single documents. Though recent work has demonstrated the effectiveness of highlighting information salience for pre-training strategy design, it struggles to generate abstractive and reflective summaries, which are critical properties for MDS. To this end, we present PELMS, a pre-trained model that uses objectives based on semantic coherence heuristics and faithfulness constraints with un-labeled multi-document inputs, to promote the generation of concise, fluent, and faithful summaries. To support the training of PELMS, we compile MultiPT, a multi-document pre-training corpus containing over 93 million documents to form more than 3 million unlabeled topic-centric document clusters, covering diverse genres such as product reviews, news, and general knowledge. We perform extensive evaluation of PELMS in low-shot settings on a wide range of MDS datasets. Our approach consistently outperforms competitive comparisons with respect to overall informativeness, abstractiveness, coherence, and faithfulness.