 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlay to the Score: Stage-Guided Dynamic Multi-Sensory Fusion for Robotic Manipulation
Aug 02, 2024



Humans possess a remarkable talent for flexibly alternating to different senses when interacting with the environment. Picture a chef skillfully gauging the timing of ingredient additions and controlling the heat according to the colors, sounds, and aromas, seamlessly navigating through every stage of the complex cooking process. This ability is founded upon a thorough comprehension of task stages, as achieving the sub-goal within each stage can necessitate the utilization of different senses. In order to endow robots with similar ability, we incorporate the task stages divided by sub-goals into the imitation learning process to accordingly guide dynamic multi-sensory fusion. We propose MS-Bot, a stage-guided dynamic multi-sensory fusion method with coarse-to-fine stage understanding, which dynamically adjusts the priority of modalities based on the fine-grained state within the predicted current stage. We train a robot system equipped with visual, auditory, and tactile sensors to accomplish challenging robotic manipulation tasks: pouring and peg insertion with keyway. Experimental results indicate that our approach enables more effective and explainable dynamic fusion, aligning more closely with the human fusion process than existing methods.
A Learning-based Adaptive Compliance Method for Symmetric Bi-manual Manipulation
Mar 27, 2023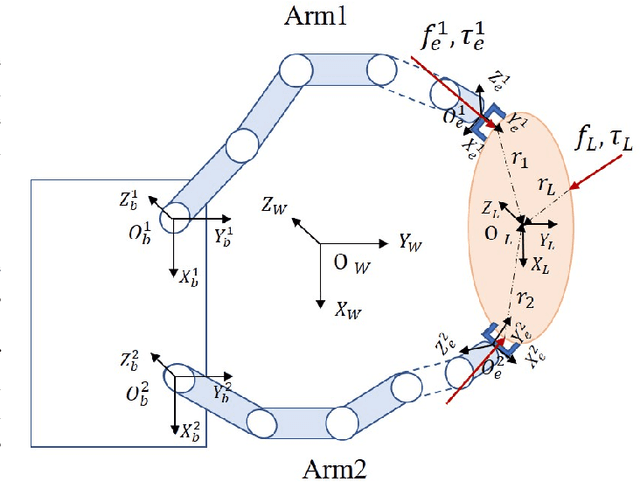
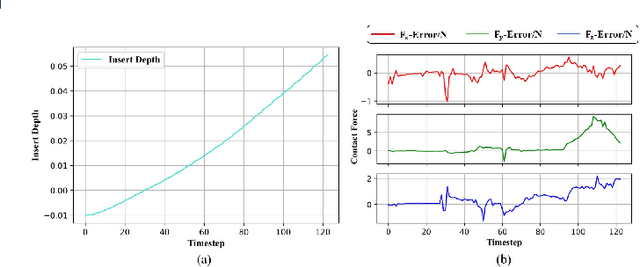
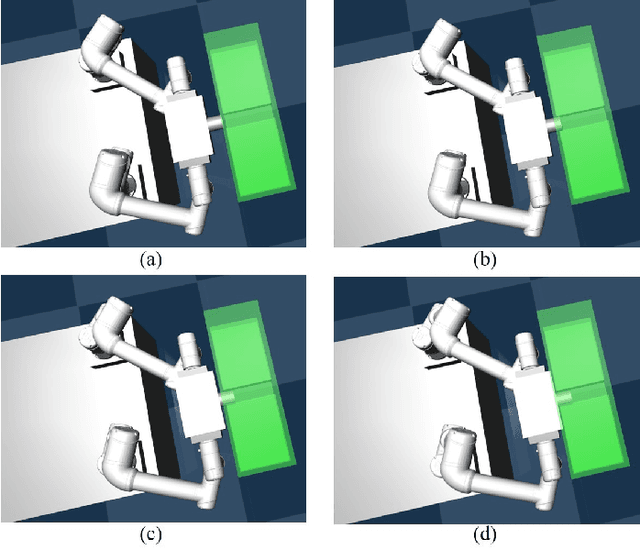
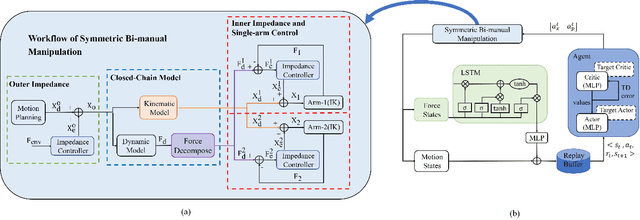
Symmetric bi-manual manipulation is essential for various on-orbit operations due to its potent load capacity. As a result, there exists an emerging research interest in the problem of achieving high operation accuracy while enhancing adaptability and compliance. However, previous works relied on an inefficient algorithm framework that separates motion planning from compliant control. Additionally, the compliant controller lacks robustness due to manually adjusted parameters. This paper proposes a novel Learning-based Adaptive Compliance algorithm (LAC) that improves the efficiency and robustness of symmetric bi-manual manipulation. Specifically, first, the algorithm framework combines desired trajectory generation with impedance-parameter adjustment to improve efficiency and robustness. Second, we introduce a centralized Actor-Critic framework with LSTM networks, enhancing the synchronization of bi-manual manipulation. LSTM networks pre-process the force states obtained by the agents, further ameliorating the performance of compliance operations. When evaluated in the dual-arm cooperative handling and peg-in-hole assembly experiments, our method outperforms baseline algorithms in terms of optimality and robustness.
Reinforcement Learning with Prior Policy Guidance for Motion Planning of Dual-Arm Free-Floating Space Robot
Sep 03, 2022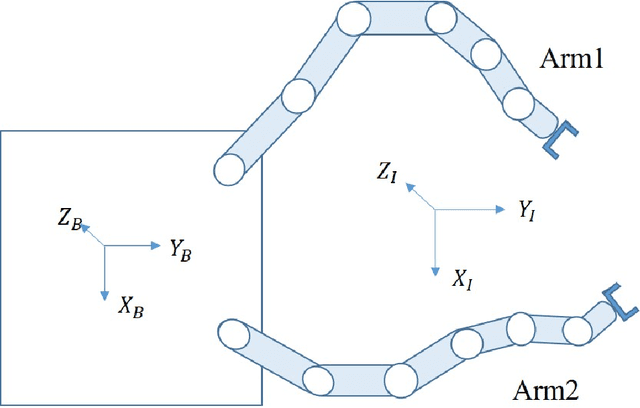
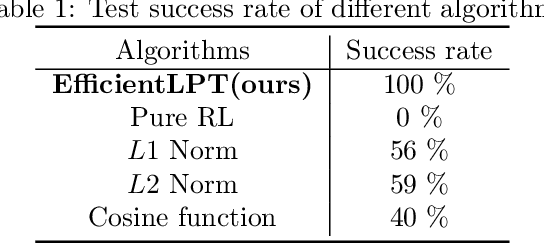
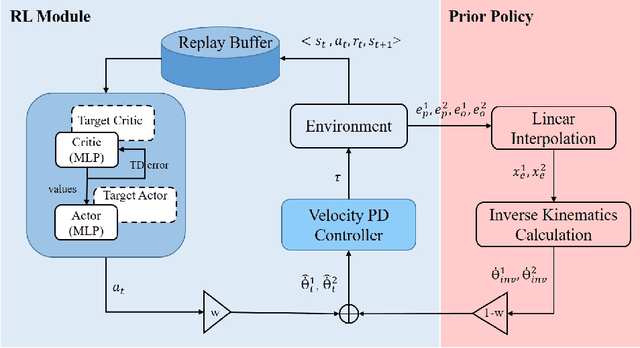
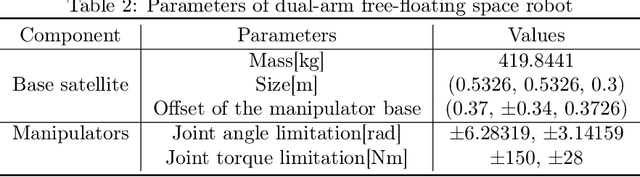
Reinforcement learning methods as a promising technique have achieved superior results in the motion planning of free-floating space robots. However, due to the increase in planning dimension and the intensification of system dynamics coupling, the motion planning of dual-arm free-floating space robots remains an open challenge. In particular, the current study cannot handle the task of capturing a non-cooperative object due to the lack of the pose constraint of the end-effectors. To address the problem, we propose a novel algorithm, EfficientLPT, to facilitate RL-based methods to improve planning accuracy efficiently. Our core contributions are constructing a mixed policy with prior knowledge guidance and introducing infinite norm to build a more reasonable reward function. Furthermore, our method successfully captures a rotating object with different spinning speeds.