 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Learning-based Adaptive Compliance Method for Symmetric Bi-manual Manipulation
Paper and Code
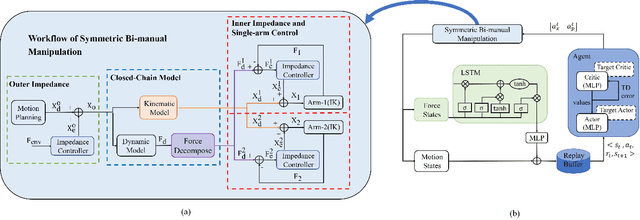
Symmetric bi-manual manipulation is essential for various on-orbit operations due to its potent load capacity. As a result, there exists an emerging research interest in the problem of achieving high operation accuracy while enhancing adaptability and compliance. However, previous works relied on an inefficient algorithm framework that separates motion planning from compliant control. Additionally, the compliant controller lacks robustness due to manually adjusted parameters. This paper proposes a novel Learning-based Adaptive Compliance algorithm (LAC) that improves the efficiency and robustness of symmetric bi-manual manipulation. Specifically, first, the algorithm framework combines desired trajectory generation with impedance-parameter adjustment to improve efficiency and robustness. Second, we introduce a centralized Actor-Critic framework with LSTM networks, enhancing the synchronization of bi-manual manipulation. LSTM networks pre-process the force states obtained by the agents, further ameliorating the performance of compliance operations. When evaluated in the dual-arm cooperative handling and peg-in-hole assembly experiments, our method outperforms baseline algorithms in terms of optimality and robustness.