 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Camera-to-ground Calibration for Autonomous Driving
Mar 31, 2023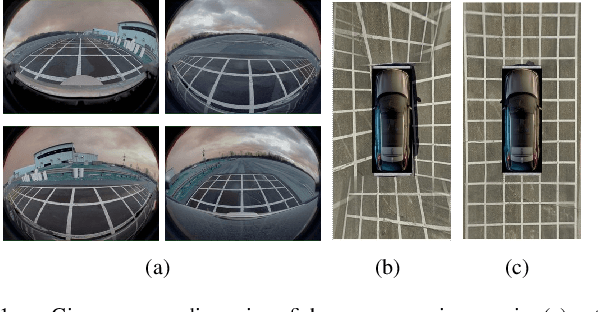
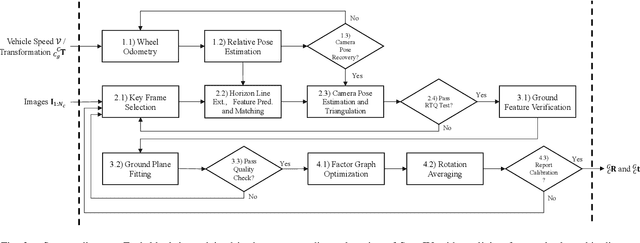
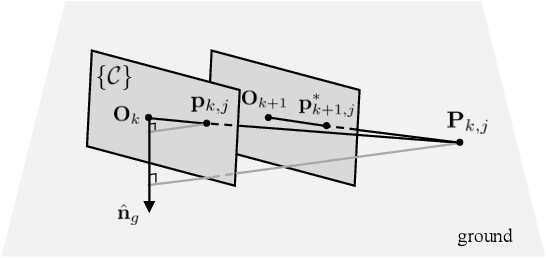
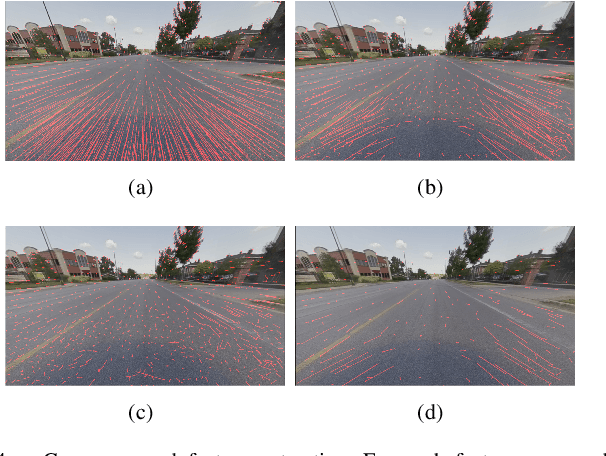
Online camera-to-ground calibration is to generate a non-rigid body transformation between the camera and the road surface in a real-time manner. Existing solutions utilize static calibration, suffering from environmental variations such as tire pressure changes, vehicle loading volume variations, and road surface diversity. Other online solutions exploit the usage of road elements or photometric consistency between overlapping views across images, which require continuous detection of specific targets on the road or assistance with multiple cameras to facilitate calibration. In our work, we propose an online monocular camera-to-ground calibration solution that does not utilize any specific targets while driving. We perform a coarse-to-fine approach for ground feature extraction through wheel odometry and estimate the camera-to-ground calibration parameters through a sliding-window-based factor graph optimization. Considering the non-rigid transformation of camera-to-ground while driving, we provide metrics to quantify calibration performance and stopping criteria to report/broadcast our satisfying calibration results. Extensive experiments using real-world data demonstrate that our algorithm is effective and outperforms state-of-the-art techniques.
Structured Hough Voting for Vision-based Highway Border Detection
Nov 18, 2014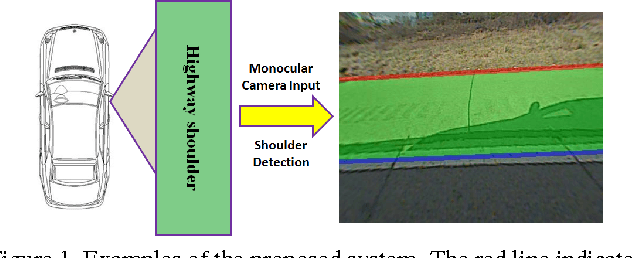
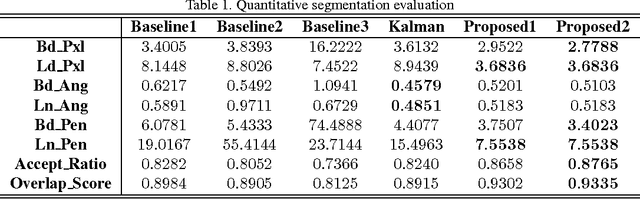
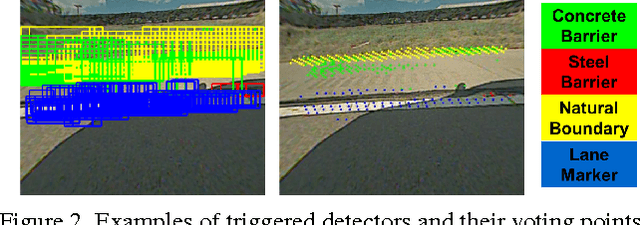
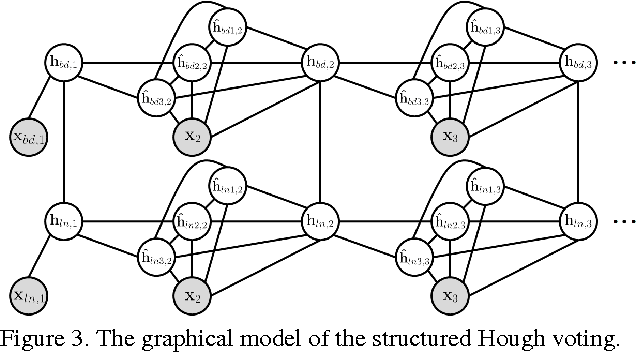
We propose a vision-based highway border detection algorithm using structured Hough voting. Our approach takes advantage of the geometric relationship between highway road borders and highway lane markings. It uses a strategy where a number of trained road border and lane marking detectors are triggered, followed by Hough voting to generate corresponding detection of the border and lane marking. Since the initially triggered detectors usually result in large number of positives, conventional frame-wise Hough voting is not able to always generate robust border and lane marking results. Therefore, we formulate this problem as a joint detection-and-tracking problem under the structured Hough voting model, where tracking refers to exploiting inter-frame structural information to stabilize the detection results. Both qualitative and quantitative evaluations show the superiority of the proposed structured Hough voting model over a number of baseline methods.