 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructured Hough Voting for Vision-based Highway Border Detection
Paper and Code
Nov 18, 2014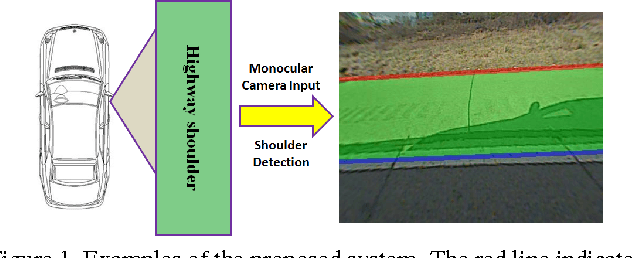
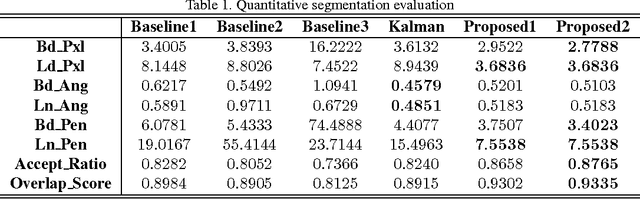
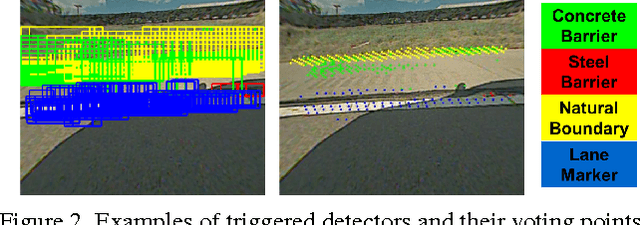
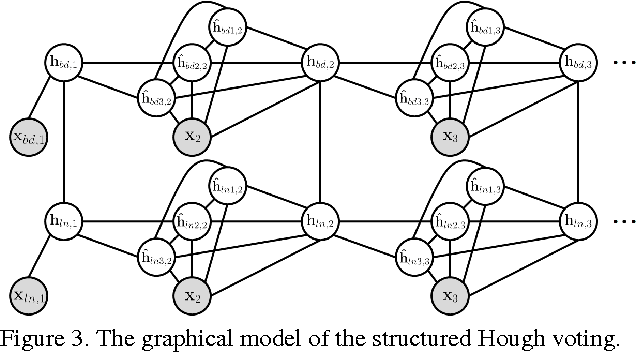
We propose a vision-based highway border detection algorithm using structured Hough voting. Our approach takes advantage of the geometric relationship between highway road borders and highway lane markings. It uses a strategy where a number of trained road border and lane marking detectors are triggered, followed by Hough voting to generate corresponding detection of the border and lane marking. Since the initially triggered detectors usually result in large number of positives, conventional frame-wise Hough voting is not able to always generate robust border and lane marking results. Therefore, we formulate this problem as a joint detection-and-tracking problem under the structured Hough voting model, where tracking refers to exploiting inter-frame structural information to stabilize the detection results. Both qualitative and quantitative evaluations show the superiority of the proposed structured Hough voting model over a number of baseline methods.