 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Design City-scale Transit Routes
Dec 21, 2025Designing efficient transit route networks is an NP-hard problem with exponentially large solution spaces that traditionally relies on manual planning processes. We present an end-to-end reinforcement learning (RL) framework based on graph attention networks for sequential transit network construction. To address the long-horizon credit assignment challenge, we introduce a two-level reward structure combining incremental topological feedback with simulation-based terminal rewards. We evaluate our approach on a new real-world dataset from Bloomington, Indiana with topologically accurate road networks, census-derived demand, and existing transit routes. Our learned policies substantially outperform existing designs and traditional heuristics across two initialization schemes and two modal-split scenarios. Under high transit adoption with transit center initialization, our approach achieves 25.6% higher service rates, 30.9\% shorter wait times, and 21.0% better bus utilization compared to the real-world network. Under mixed-mode conditions with random initialization, it delivers 68.8% higher route efficiency than demand coverage heuristics and 5.9% lower travel times than shortest path construction. These results demonstrate that end-to-end RL can design transit networks that substantially outperform both human-designed systems and hand-crafted heuristics on realistic city-scale benchmarks.
Elevation Aware 2D/3D Co-simulation Framework for Large-scale Traffic Flow and High-fidelity Vehicle Dynamics
Dec 12, 2025Reliable testing of autonomous driving systems requires simulation environments that combine large-scale traffic modeling with realistic 3D perception and terrain. Existing tools rarely capture real-world elevation, limiting their usefulness in cities with complex topography. This paper presents an automated, elevation-aware co-simulation framework that integrates SUMO with CARLA using a pipeline that fuses OpenStreetMap road networks and USGS elevation data into physically consistent 3D environments. The system generates smooth elevation profiles, validates geometric accuracy, and enables synchronized 2D-3D simulation across platforms. Demonstrations on multiple regions of San Francisco show the framework's scalability and ability to reproduce steep and irregular terrain. The result is a practical foundation for high-fidelity autonomous vehicle testing in realistic, elevation-rich urban settings.
PulseRide: A Robotic Wheelchair for Personalized Exertion Control with Human-in-the-Loop Reinforcement Learning
Jun 05, 2025Maintaining an active lifestyle is vital for quality of life, yet challenging for wheelchair users. For instance, powered wheelchairs face increasing risks of obesity and deconditioning due to inactivity. Conversely, manual wheelchair users, who propel the wheelchair by pushing the wheelchair's handrims, often face upper extremity injuries from repetitive motions. These challenges underscore the need for a mobility system that promotes activity while minimizing injury risk. Maintaining optimal exertion during wheelchair use enhances health benefits and engagement, yet the variations in individual physiological responses complicate exertion optimization. To address this, we introduce PulseRide, a novel wheelchair system that provides personalized assistance based on each user's physiological responses, helping them maintain their physical exertion goals. Unlike conventional assistive systems focused on obstacle avoidance and navigation, PulseRide integrates real-time physiological data-such as heart rate and ECG-with wheelchair speed to deliver adaptive assistance. Using a human-in-the-loop reinforcement learning approach with Deep Q-Network algorithm (DQN), the system adjusts push assistance to keep users within a moderate activity range without under- or over-exertion. We conducted preliminary tests with 10 users on various terrains, including carpet and slate, to assess PulseRide's effectiveness. Our findings show that, for individual users, PulseRide maintains heart rates within the moderate activity zone as much as 71.7 percent longer than manual wheelchairs. Among all users, we observed an average reduction in muscle contractions of 41.86 percent, delaying fatigue onset and enhancing overall comfort and engagement. These results indicate that PulseRide offers a healthier, adaptive mobility solution, bridging the gap between passive and physically taxing mobility options.
MIAT: Maneuver-Intention-Aware Transformer for Spatio-Temporal Trajectory Prediction
Apr 07, 2025



Accurate vehicle trajectory prediction is critical for safe and efficient autonomous driving, especially in mixed traffic environments with both human-driven and autonomous vehicles. However, uncertainties introduced by inherent driving behaviors -- such as acceleration, deceleration, and left and right maneuvers -- pose significant challenges for reliable trajectory prediction. We introduce a Maneuver-Intention-Aware Transformer (MIAT) architecture, which integrates a maneuver intention awareness mechanism with spatiotemporal interaction modeling to enhance long-horizon trajectory predictions. We systematically investigate the impact of varying awareness of maneuver intention on both short- and long-horizon trajectory predictions. Evaluated on the real-world NGSIM dataset and benchmarked against various transformer- and LSTM-based methods, our approach achieves an improvement of up to 4.7% in short-horizon predictions and a 1.6% in long-horizon predictions compared to other intention-aware benchmark methods. Moreover, by leveraging an intention awareness control mechanism, MIAT realizes an 11.1% performance boost in long-horizon predictions, with a modest drop in short-horizon performance.
Joint Pedestrian and Vehicle Traffic Optimization in Urban Environments using Reinforcement Learning
Apr 07, 2025Reinforcement learning (RL) holds significant promise for adaptive traffic signal control. While existing RL-based methods demonstrate effectiveness in reducing vehicular congestion, their predominant focus on vehicle-centric optimization leaves pedestrian mobility needs and safety challenges unaddressed. In this paper, we present a deep RL framework for adaptive control of eight traffic signals along a real-world urban corridor, jointly optimizing both pedestrian and vehicular efficiency. Our single-agent policy is trained using real-world pedestrian and vehicle demand data derived from Wi-Fi logs and video analysis. The results demonstrate significant performance improvements over traditional fixed-time signals, reducing average wait times per pedestrian and per vehicle by up to 67% and 52%, respectively, while simultaneously decreasing total accumulated wait times for both groups by up to 67% and 53%. Additionally, our results demonstrate generalization capabilities across varying traffic demands, including conditions entirely unseen during training, validating RL's potential for developing transportation systems that serve all road users.
Large-Scale Mixed-Traffic and Intersection Control using Multi-agent Reinforcement Learning
Apr 07, 2025Traffic congestion remains a significant challenge in modern urban networks. Autonomous driving technologies have emerged as a potential solution. Among traffic control methods, reinforcement learning has shown superior performance over traffic signals in various scenarios. However, prior research has largely focused on small-scale networks or isolated intersections, leaving large-scale mixed traffic control largely unexplored. This study presents the first attempt to use decentralized multi-agent reinforcement learning for large-scale mixed traffic control in which some intersections are managed by traffic signals and others by robot vehicles. Evaluating a real-world network in Colorado Springs, CO, USA with 14 intersections, we measure traffic efficiency via average waiting time of vehicles at intersections and the number of vehicles reaching their destinations within a time window (i.e., throughput). At 80% RV penetration rate, our method reduces waiting time from 6.17 s to 5.09 s and increases throughput from 454 vehicles per 500 seconds to 493 vehicles per 500 seconds, outperforming the baseline of fully signalized intersections. These findings suggest that integrating reinforcement learning-based control large-scale traffic can improve overall efficiency and may inform future urban planning strategies.
Mutual Adaptation in Human-Robot Co-Transportation with Human Preference Uncertainty
Mar 11, 2025Mutual adaptation can significantly enhance overall task performance in human-robot co-transportation by integrating both the robot's and human's understanding of the environment. While human modeling helps capture humans' subjective preferences, two challenges persist: (i) the uncertainty of human preference parameters and (ii) the need to balance adaptation strategies that benefit both humans and robots. In this paper, we propose a unified framework to address these challenges and improve task performance through mutual adaptation. First, instead of relying on fixed parameters, we model a probability distribution of human choices by incorporating a range of uncertain human parameters. Next, we introduce a time-varying stubbornness measure and a coordination mode transition model, which allows either the robot to lead the team's trajectory or, if a human's preferred path conflicts with the robot's plan and their stubbornness exceeds a threshold, the robot to transition to following the human. Finally, we introduce a pose optimization strategy to mitigate the uncertain human behaviors when they are leading. To validate the framework, we design and perform experiments with real human feedback. We then demonstrate, through simulations, the effectiveness of our models in enhancing task performance with mutual adaptation and pose optimization.
Analyzing Fundamental Diagrams of Mixed Traffic Control at Unsignalized Intersections
Dec 20, 2024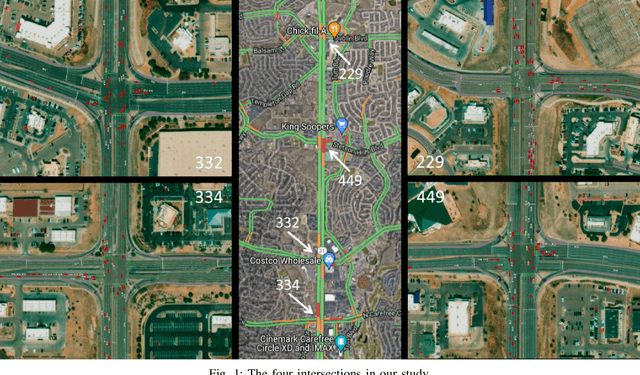
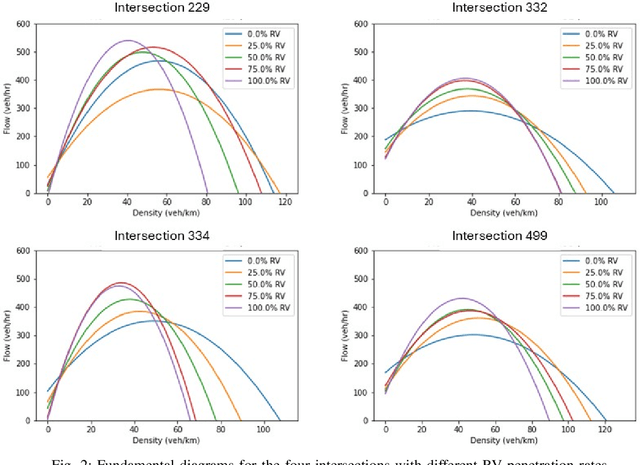
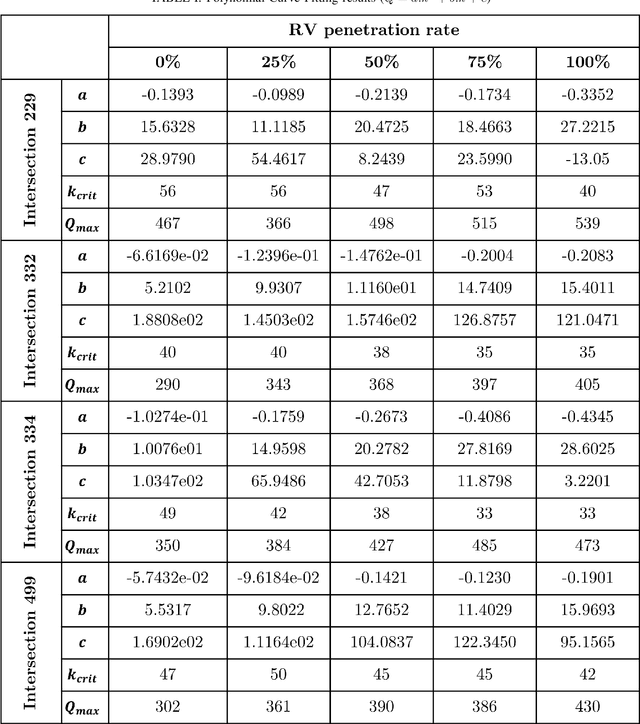
This report examines the effect of mixed traffic, specifically the variation in robot vehicle (RV) penetration rates, on the fundamental diagrams at unsignalized intersections. Through a series of simulations across four distinct intersections, the relationship between traffic flow characteristics were analyzed. The RV penetration rates were varied from 0% to 100% in increments of 25%. The study reveals that while the presence of RVs influences traffic dynamics, the impact on flow and speed is not uniform across different levels of RV penetration. The fundamental diagrams indicate that intersections may experience an increase in capacity with varying levels of RVs, but this trend does not consistently hold as RV penetration approaches 100%. The variability observed across intersections suggests that local factors possibly influence the traffic flow characteristics. These findings highlight the complexity of integrating RVs into the existing traffic system and underscore the need for intersection-specific traffic management strategies to accommodate the transition towards increased RV presence.
Exploring Transformer-Augmented LSTM for Temporal and Spatial Feature Learning in Trajectory Prediction
Dec 18, 2024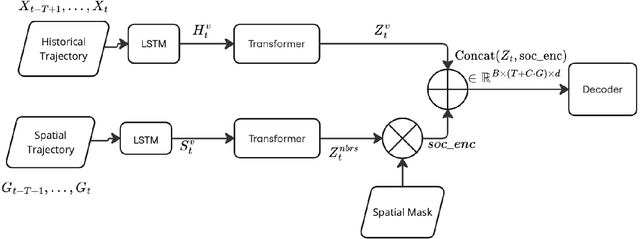
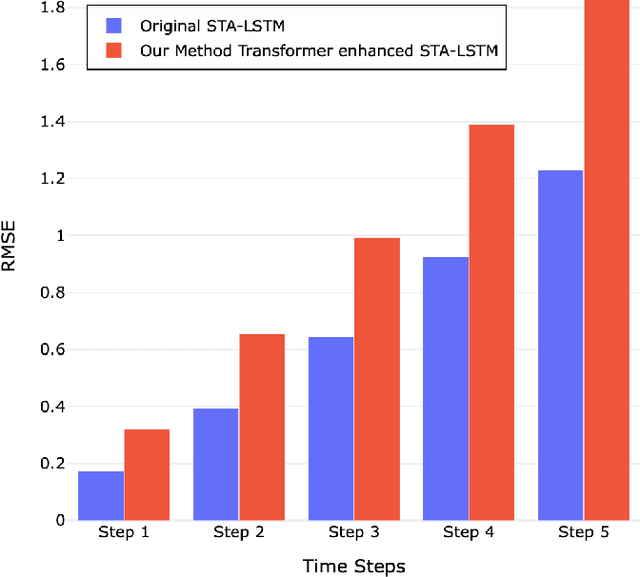
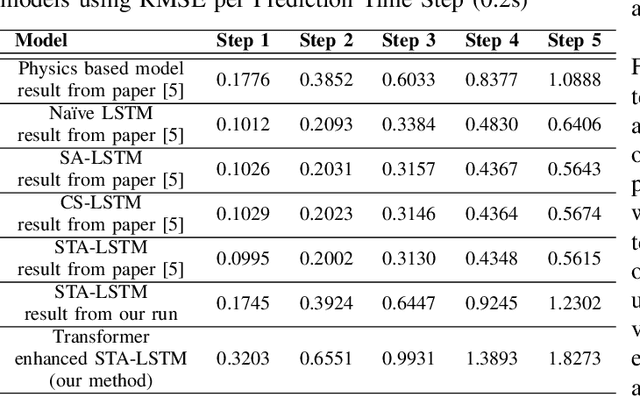
Accurate vehicle trajectory prediction is crucial for ensuring safe and efficient autonomous driving. This work explores the integration of Transformer based model with Long Short-Term Memory (LSTM) based technique to enhance spatial and temporal feature learning in vehicle trajectory prediction. Here, a hybrid model that combines LSTMs for temporal encoding with a Transformer encoder for capturing complex interactions between vehicles is proposed. Spatial trajectory features of the neighboring vehicles are processed and goes through a masked scatter mechanism in a grid based environment, which is then combined with temporal trajectory of the vehicles. This combined trajectory data are learned by sequential LSTM encoding and Transformer based attention layers. The proposed model is benchmarked against predecessor LSTM based methods, including STA-LSTM, SA-LSTM, CS-LSTM, and NaiveLSTM. Our results, while not outperforming it's predecessor, demonstrate the potential of integrating Transformers with LSTM based technique to build interpretable trajectory prediction model. Future work will explore alternative architectures using Transformer applications to further enhance performance. This study provides a promising direction for improving trajectory prediction models by leveraging transformer based architectures, paving the way for more robust and interpretable vehicle trajectory prediction system.
A Comprehensive Review on Traffic Datasets and Simulators for Autonomous Vehicles
Dec 17, 2024



Autonomous driving has rapidly developed and shown promising performance due to recent advances in hardware and deep learning techniques. High-quality datasets are fundamental for developing reliable autonomous driving algorithms. Previous dataset surveys either focused on a limited number or lacked detailed investigation of dataset characteristics. Besides, we analyze the annotation processes, existing labeling tools, and the annotation quality of datasets, showing the importance of establishing a standard annotation pipeline. On the other hand, we thoroughly analyze the impact of geographical and adversarial environmental conditions on the performance of autonomous driving systems. Moreover, we exhibit the data distribution of several vital datasets and discuss their pros and cons accordingly. Additionally, this paper provides a comprehensive analysis of publicly available traffic simulators. In addition to informing about traffic datasets, it is also the goal of this paper to provide context and information on the current capabilities of traffic simulators for their specific contributions to autonomous vehicle simulation and development. Furthermore, this paper discusses future directions and the increasing importance of synthetic data generation in simulators to enhance the training and creation of effective simulations. Finally, we discuss the current challenges and the development trend of future autonomous driving datasets.