 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIAT: Maneuver-Intention-Aware Transformer for Spatio-Temporal Trajectory Prediction
Apr 07, 2025



Accurate vehicle trajectory prediction is critical for safe and efficient autonomous driving, especially in mixed traffic environments with both human-driven and autonomous vehicles. However, uncertainties introduced by inherent driving behaviors -- such as acceleration, deceleration, and left and right maneuvers -- pose significant challenges for reliable trajectory prediction. We introduce a Maneuver-Intention-Aware Transformer (MIAT) architecture, which integrates a maneuver intention awareness mechanism with spatiotemporal interaction modeling to enhance long-horizon trajectory predictions. We systematically investigate the impact of varying awareness of maneuver intention on both short- and long-horizon trajectory predictions. Evaluated on the real-world NGSIM dataset and benchmarked against various transformer- and LSTM-based methods, our approach achieves an improvement of up to 4.7% in short-horizon predictions and a 1.6% in long-horizon predictions compared to other intention-aware benchmark methods. Moreover, by leveraging an intention awareness control mechanism, MIAT realizes an 11.1% performance boost in long-horizon predictions, with a modest drop in short-horizon performance.
Analyzing Fundamental Diagrams of Mixed Traffic Control at Unsignalized Intersections
Dec 20, 2024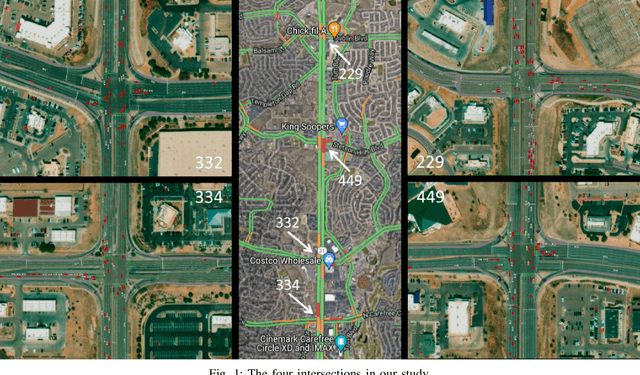
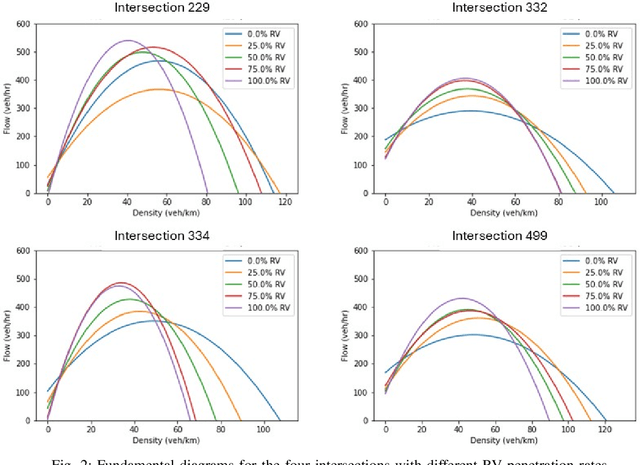
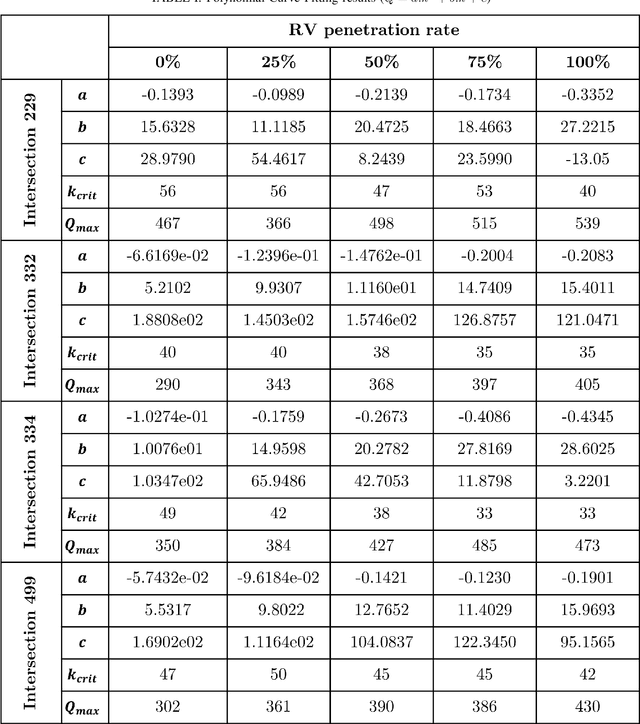
This report examines the effect of mixed traffic, specifically the variation in robot vehicle (RV) penetration rates, on the fundamental diagrams at unsignalized intersections. Through a series of simulations across four distinct intersections, the relationship between traffic flow characteristics were analyzed. The RV penetration rates were varied from 0% to 100% in increments of 25%. The study reveals that while the presence of RVs influences traffic dynamics, the impact on flow and speed is not uniform across different levels of RV penetration. The fundamental diagrams indicate that intersections may experience an increase in capacity with varying levels of RVs, but this trend does not consistently hold as RV penetration approaches 100%. The variability observed across intersections suggests that local factors possibly influence the traffic flow characteristics. These findings highlight the complexity of integrating RVs into the existing traffic system and underscore the need for intersection-specific traffic management strategies to accommodate the transition towards increased RV presence.
Neighbor-Aware Reinforcement Learning for Mixed Traffic Optimization in Large-scale Networks
Dec 17, 2024


Managing mixed traffic comprising human-driven and robot vehicles (RVs) across large-scale networks presents unique challenges beyond single-intersection control. This paper proposes a reinforcement learning framework for coordinating mixed traffic across multiple interconnected intersections. Our key contribution is a neighbor-aware reward mechanism that enables RVs to maintain balanced distribution across the network while optimizing local intersection efficiency. We evaluate our approach using a real-world network, demonstrating its effectiveness in managing realistic traffic patterns. Results show that our method reduces average waiting times by 39.2% compared to the state-of-the-art single-intersection control policy and 79.8% compared to traditional traffic signals. The framework's ability to coordinate traffic across multiple intersections while maintaining balanced RV distribution provides a foundation for deploying learning-based solutions in urban traffic systems.
Beacon: A Naturalistic Driving Dataset During Blackouts for Benchmarking Traffic Reconstruction and Control
Dec 17, 2024Extreme weather events and other vulnerabilities are causing blackouts with increasing frequency, disrupting traffic control systems and posing significant challenges to urban mobility. To address this growing concern, we introduce \model{}, a naturalistic driving dataset collected during blackouts at complex intersections. Beacon provides detailed traffic data from two unsignalized intersections in Memphis, TN, including timesteps, origin, and destination lanes for each vehicle over four hours. We analyze traffic demand, vehicle trajectories, and density across different scenarios. We also use the dataset to reconstruct unsignalized, signalized and mixed traffic conditions, demonstrating its utility for benchmarking traffic reconstruction techniques and control methods. To the best of our knowledge, Beacon could be the first public available traffic dataset that captures naturalistic driving behaviors at complex intersections.