 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-autonomous Teleoperation using Differential Flatness of a Crane Robot for Aircraft In-Wing Inspection
Dec 14, 2024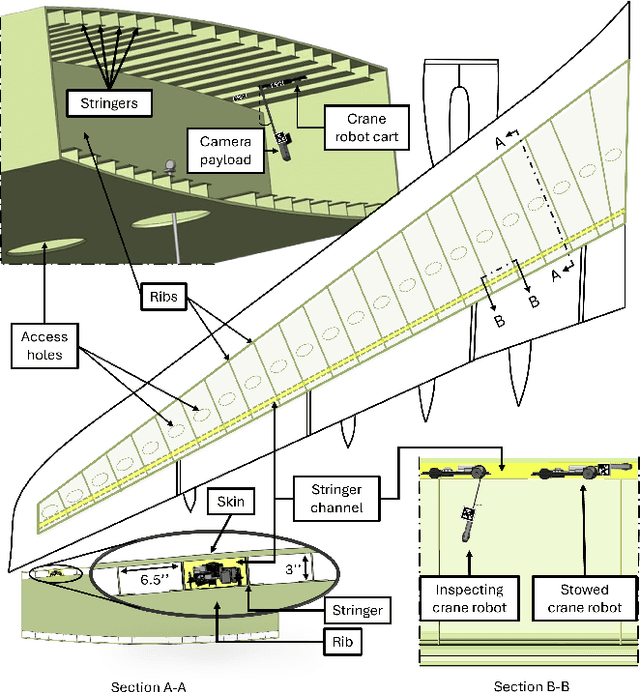
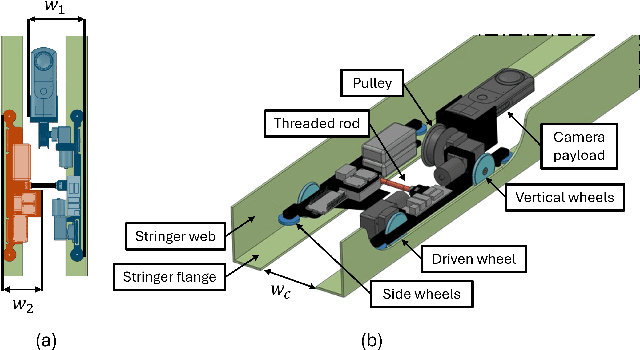
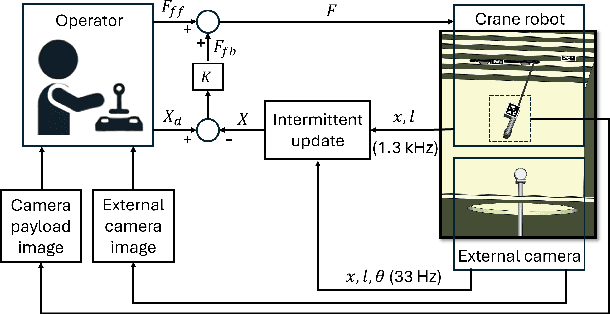
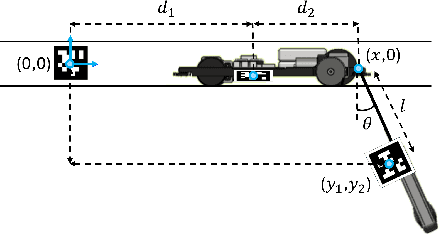
Visual inspection of confined spaces such as aircraft wings is ergonomically challenging for human mechanics. This work presents a novel crane robot that can travel the entire span of the aircraft wing, enabling mechanics to perform inspection from outside of the confined space. However, teleoperation of the crane robot can still be a challenge due to the need to avoid obstacles in the workspace and potential oscillations of the camera payload. The main contribution of this work is to exploit the differential flatness of the crane-robot dynamics for designing reduced-oscillation, collision-free time trajectories of the camera payload for use in teleoperation. Autonomous experiments verify the efficacy of removing undesired oscillations by 89%. Furthermore, teleoperation experiments demonstrate that the controller eliminated collisions (from 33% to 0%) when 12 participants performed an inspection task with the use of proposed trajectory selection when compared to the case without it. Moreover, even discounting the failures due to collisions, the proposed approach improved task efficiency by 18.7% when compared to the case without it.
Human-Assisted Robotic Detection of Foreign Object Debris Inside Confined Spaces of Marine Vessels Using Probabilistic Mapping
Jul 01, 2022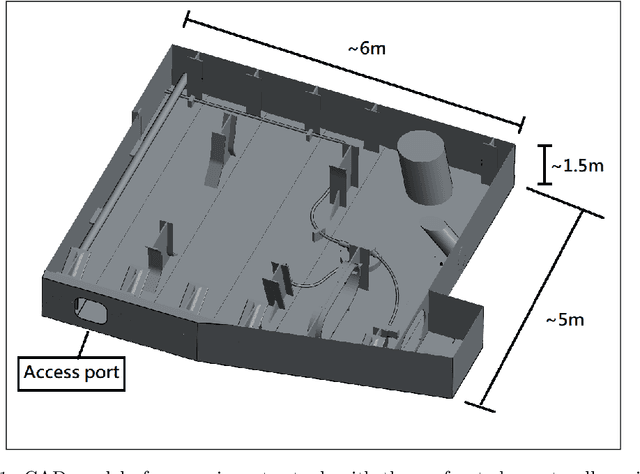

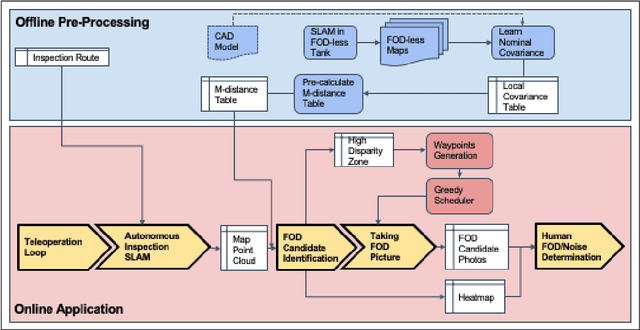

Many complex vehicular systems, such as large marine vessels, contain confined spaces like water tanks, which are critical for the safe functioning of the vehicles. It is particularly hazardous for humans to inspect such spaces due to limited accessibility, poor visibility, and unstructured configuration. While robots provide a viable alternative, they encounter the same set of challenges in realizing robust autonomy. In this work, we specifically address the problem of detecting foreign object debris (FODs) left inside the confined spaces using a visual mapping-based system that relies on Mahalanobis distance-driven comparisons between the nominal and online maps for local outlier identification. Simulation trials show extremely high recall but low precision for the outlier identification method. The assistance of remote humans is, therefore, taken to deal with the precision problem by going over the close-up robot camera images of the outlier regions. An online survey is conducted to show the usefulness of this assistance process. Physical experiments are also reported on a GPU-enabled mobile robot platform inside a scaled-down, prototype tank to demonstrate the feasibility of the FOD detection system.