 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-autonomous Teleoperation using Differential Flatness of a Crane Robot for Aircraft In-Wing Inspection
Dec 14, 2024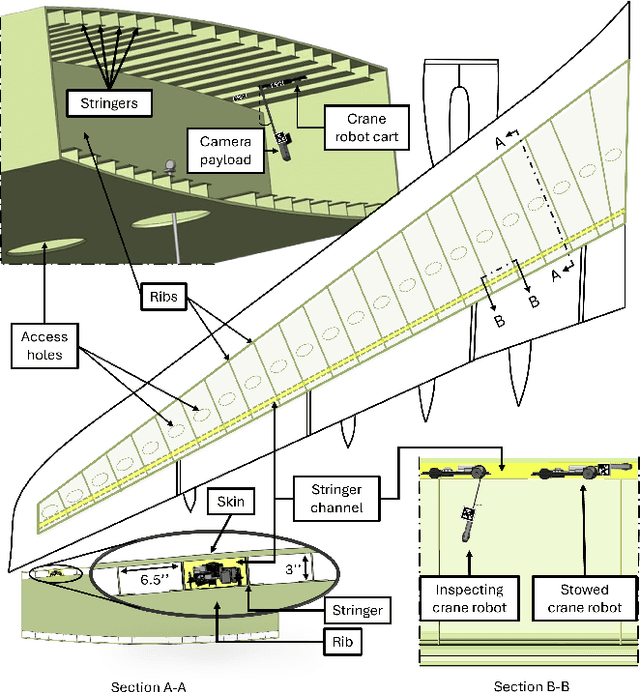
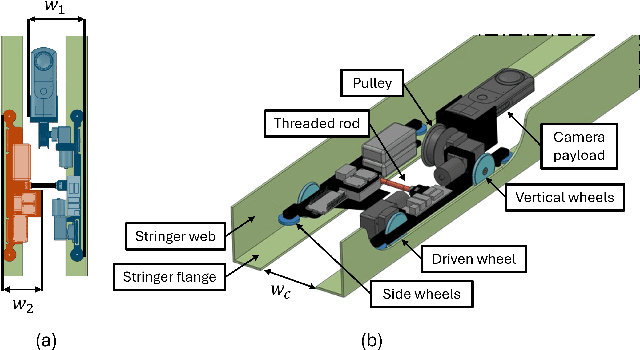
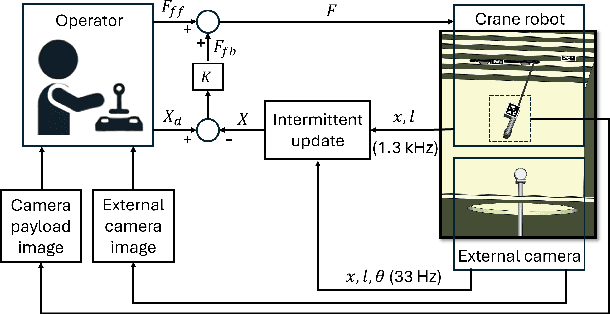
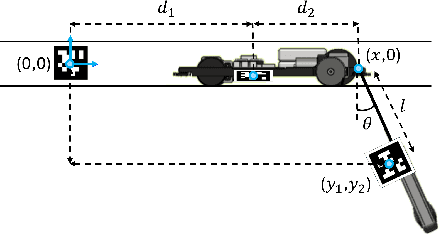
Visual inspection of confined spaces such as aircraft wings is ergonomically challenging for human mechanics. This work presents a novel crane robot that can travel the entire span of the aircraft wing, enabling mechanics to perform inspection from outside of the confined space. However, teleoperation of the crane robot can still be a challenge due to the need to avoid obstacles in the workspace and potential oscillations of the camera payload. The main contribution of this work is to exploit the differential flatness of the crane-robot dynamics for designing reduced-oscillation, collision-free time trajectories of the camera payload for use in teleoperation. Autonomous experiments verify the efficacy of removing undesired oscillations by 89%. Furthermore, teleoperation experiments demonstrate that the controller eliminated collisions (from 33% to 0%) when 12 participants performed an inspection task with the use of proposed trajectory selection when compared to the case without it. Moreover, even discounting the failures due to collisions, the proposed approach improved task efficiency by 18.7% when compared to the case without it.
MIMO ILC for Precision SEA robots using Input-weighted Complex-Kernel Regression
Oct 23, 2020
This work improves the positioning precision of lightweight robots with series elastic actuators (SEAs). Lightweight SEA robots, along with low-impedance control, can maneuver without causing damage in uncertain, confined spaces such as inside an aircraft wing during aircraft assembly. Nevertheless, substantial modeling uncertainties in SEA robots reduce the precision achieved by model-based approaches such as inversion-based feedforward. Therefore, this article improves the precision of SEA robots around specified operating points, through a multi-input multi-output (MIMO), iterative learning control (ILC) approach. The main contributions of this article are to (i) introduce an input-weighted complex kernel to estimate local MIMO models using complex Gaussian process regression (c-GPR) (ii) develop Ger\v{s}gorin-theorem-based conditions on the iteration gains for ensuring ILC convergence to precision within noise-related limits, even with errors in the estimated model; and (iii) demonstrate precision positioning with an experimental SEA robot. Comparative experimental results, with and without ILC, show around 90% improvement in the positioning precision (close to the repeatability limit of the robot) and a 10-times increase in the SEA robot's operating speed with the use of the MIMO ILC.
Iterative Machine Learning for Precision Trajectory Tracking with Series Elastic Actuators
Oct 05, 2017
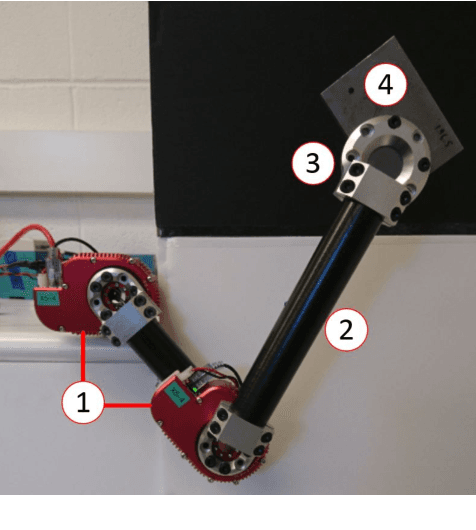
When robots operate in unknown environments small errors in postions can lead to large variations in the contact forces, especially with typical high-impedance designs. This can potentially damage the surroundings and/or the robot. Series elastic actuators (SEAs) are a popular way to reduce the output impedance of a robotic arm to improve control authority over the force exerted on the environment. However this increased control over forces with lower impedance comes at the cost of lower positioning precision and bandwidth. This article examines the use of an iteratively-learned feedforward command to improve position tracking when using SEAs. Over each iteration, the output responses of the system to the quantized inputs are used to estimate a linearized local system models. These estimated models are obtained using a complex-valued Gaussian Process Regression (cGPR) technique and then, used to generate a new feedforward input command based on the previous iteration's error. This article illustrates this iterative machine learning (IML) technique for a two degree of freedom (2-DOF) robotic arm, and demonstrates successful convergence of the IML approach to reduce the tracking error.
Uncertainty-based Arbitration of Human-Machine Shared Control
Nov 18, 2015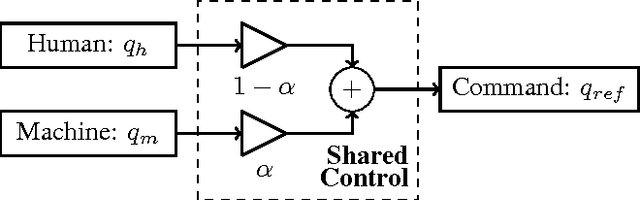
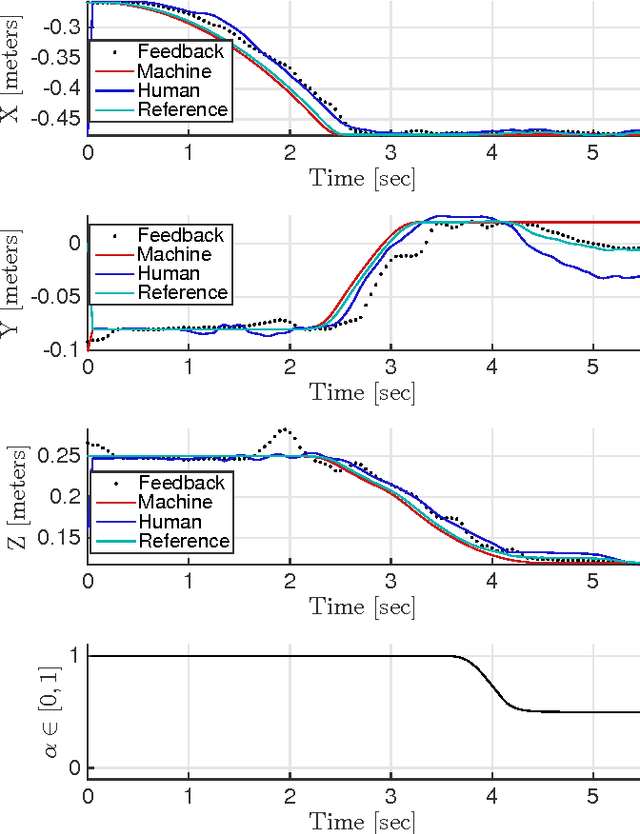
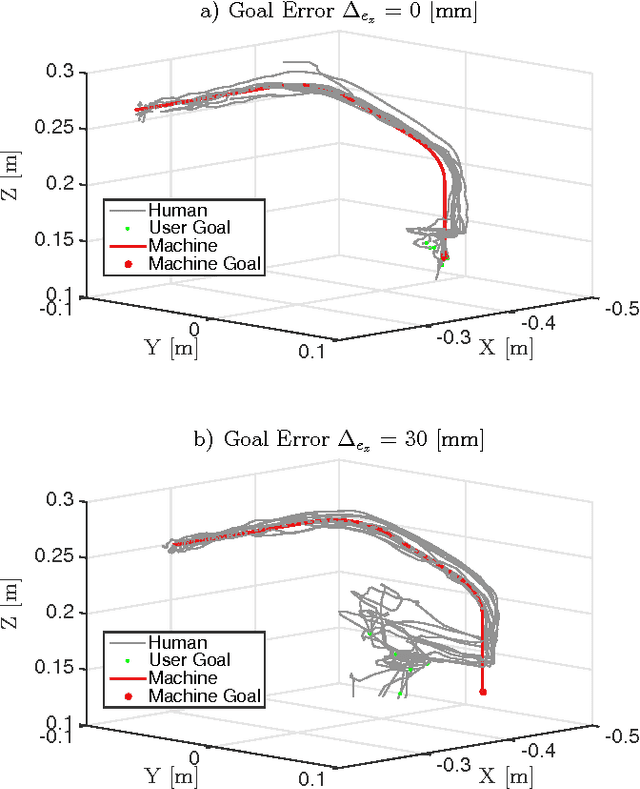
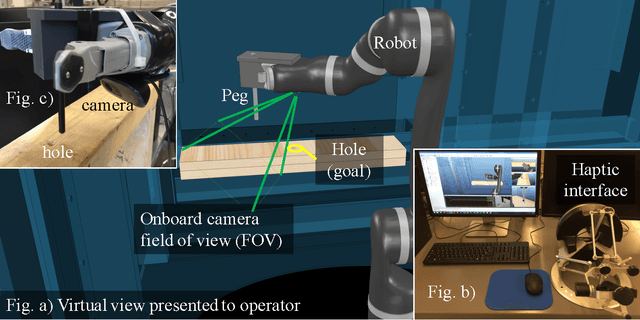
Manufacturing requires consistent production rate and task success for sustainable operation. Some manufacturing tasks require a semi-autonomous approach, exploiting the combination of human adaptability and machine precision and speed, to be cost effective. The main contribution of this paper is a new approach to determine the level of autonomy for human-machine shared control based on the automation uncertainty. Moreover, the haptic feedback is scaled by the level of autonomy to indicate machine confidence to the operator. Experimentation results, with a human-robot peg-in-a-hole testbed, show more than 5 times improvement in the error tolerance for task completion with the shared control approach when compared to a purely autonomous method.