 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-based Arbitration of Human-Machine Shared Control
Paper and Code
Nov 18, 2015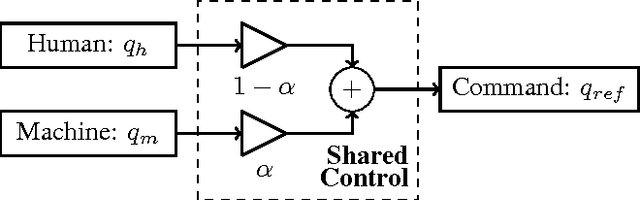
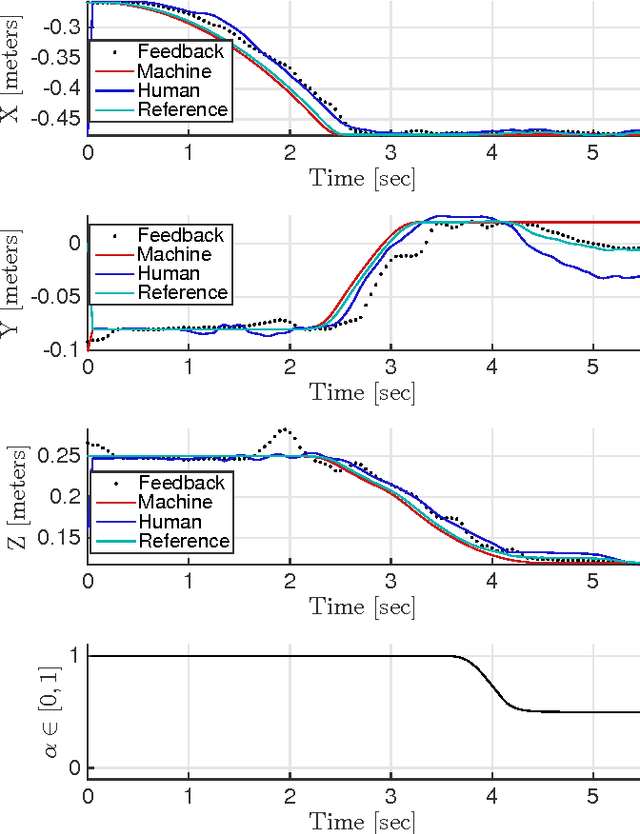
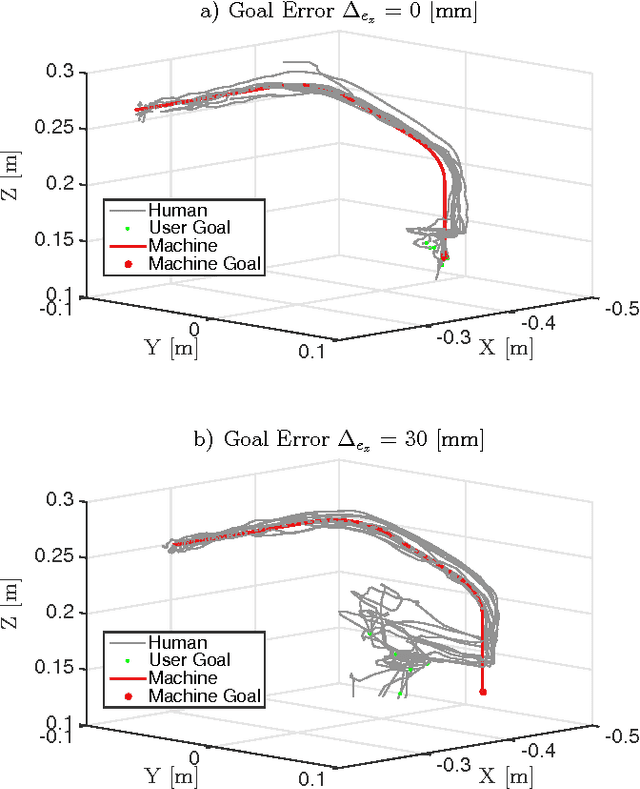
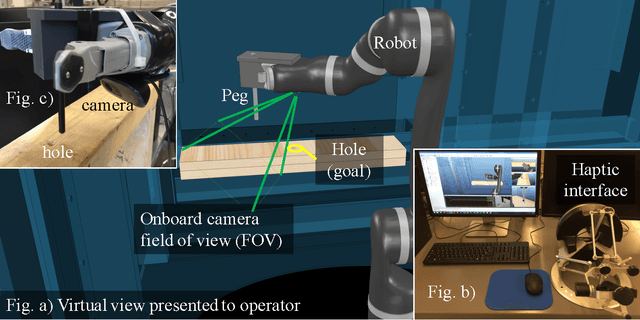
Manufacturing requires consistent production rate and task success for sustainable operation. Some manufacturing tasks require a semi-autonomous approach, exploiting the combination of human adaptability and machine precision and speed, to be cost effective. The main contribution of this paper is a new approach to determine the level of autonomy for human-machine shared control based on the automation uncertainty. Moreover, the haptic feedback is scaled by the level of autonomy to indicate machine confidence to the operator. Experimentation results, with a human-robot peg-in-a-hole testbed, show more than 5 times improvement in the error tolerance for task completion with the shared control approach when compared to a purely autonomous method.