 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIMO ILC for Precision SEA robots using Input-weighted Complex-Kernel Regression
Oct 23, 2020
This work improves the positioning precision of lightweight robots with series elastic actuators (SEAs). Lightweight SEA robots, along with low-impedance control, can maneuver without causing damage in uncertain, confined spaces such as inside an aircraft wing during aircraft assembly. Nevertheless, substantial modeling uncertainties in SEA robots reduce the precision achieved by model-based approaches such as inversion-based feedforward. Therefore, this article improves the precision of SEA robots around specified operating points, through a multi-input multi-output (MIMO), iterative learning control (ILC) approach. The main contributions of this article are to (i) introduce an input-weighted complex kernel to estimate local MIMO models using complex Gaussian process regression (c-GPR) (ii) develop Ger\v{s}gorin-theorem-based conditions on the iteration gains for ensuring ILC convergence to precision within noise-related limits, even with errors in the estimated model; and (iii) demonstrate precision positioning with an experimental SEA robot. Comparative experimental results, with and without ILC, show around 90% improvement in the positioning precision (close to the repeatability limit of the robot) and a 10-times increase in the SEA robot's operating speed with the use of the MIMO ILC.
Uncertainty-based Arbitration of Human-Machine Shared Control
Nov 18, 2015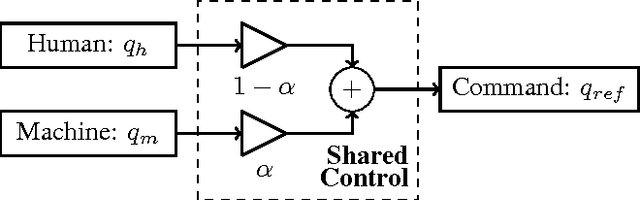
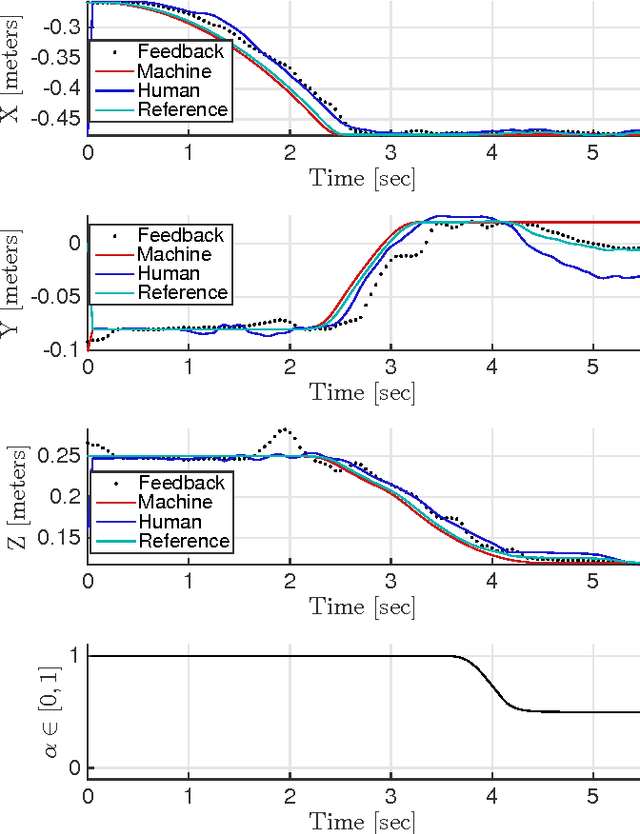
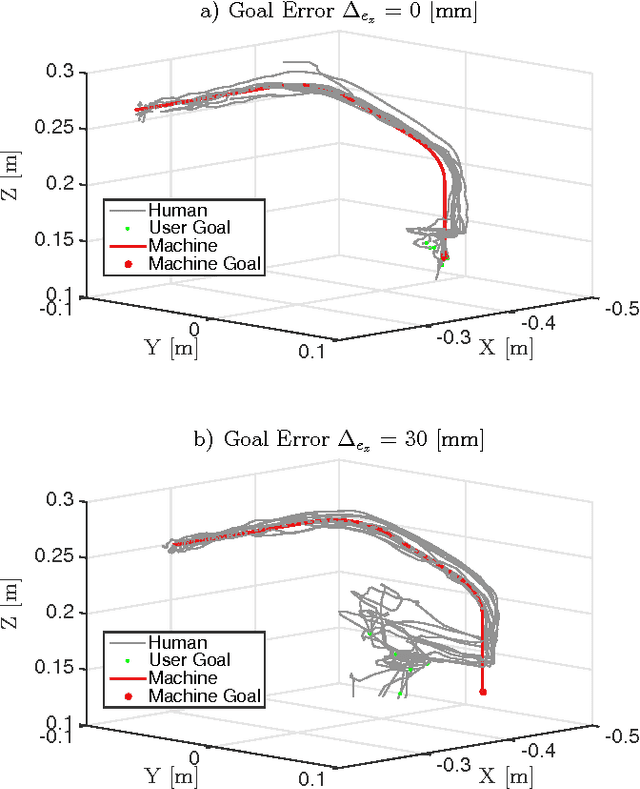
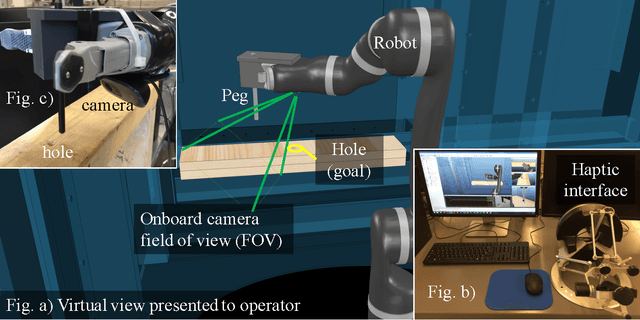
Manufacturing requires consistent production rate and task success for sustainable operation. Some manufacturing tasks require a semi-autonomous approach, exploiting the combination of human adaptability and machine precision and speed, to be cost effective. The main contribution of this paper is a new approach to determine the level of autonomy for human-machine shared control based on the automation uncertainty. Moreover, the haptic feedback is scaled by the level of autonomy to indicate machine confidence to the operator. Experimentation results, with a human-robot peg-in-a-hole testbed, show more than 5 times improvement in the error tolerance for task completion with the shared control approach when compared to a purely autonomous method.