 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-autonomous Teleoperation using Differential Flatness of a Crane Robot for Aircraft In-Wing Inspection
Paper and Code
Dec 14, 2024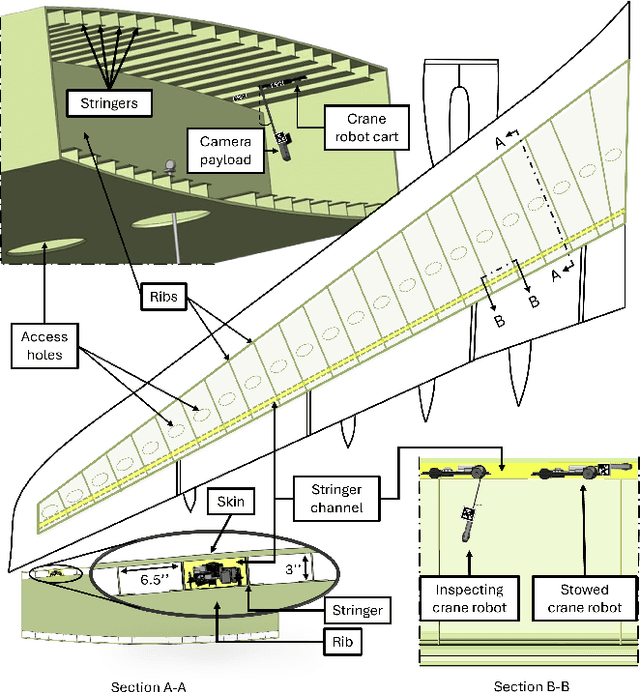
Visual inspection of confined spaces such as aircraft wings is ergonomically challenging for human mechanics. This work presents a novel crane robot that can travel the entire span of the aircraft wing, enabling mechanics to perform inspection from outside of the confined space. However, teleoperation of the crane robot can still be a challenge due to the need to avoid obstacles in the workspace and potential oscillations of the camera payload. The main contribution of this work is to exploit the differential flatness of the crane-robot dynamics for designing reduced-oscillation, collision-free time trajectories of the camera payload for use in teleoperation. Autonomous experiments verify the efficacy of removing undesired oscillations by 89%. Furthermore, teleoperation experiments demonstrate that the controller eliminated collisions (from 33% to 0%) when 12 participants performed an inspection task with the use of proposed trajectory selection when compared to the case without it. Moreover, even discounting the failures due to collisions, the proposed approach improved task efficiency by 18.7% when compared to the case without it.