 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGameplayQA: A Benchmarking Framework for Decision-Dense POV-Synced Multi-Video Understanding of 3D Virtual Agents
Mar 25, 2026Multimodal LLMs are increasingly deployed as perceptual backbones for autonomous agents in 3D environments, from robotics to virtual worlds. These applications require agents to perceive rapid state changes, attribute actions to the correct entities, and reason about concurrent multi-agent behaviors from a first-person perspective, capabilities that existing benchmarks do not adequately evaluate. We introduce GameplayQA, a framework for evaluating agentic-centric perception and reasoning through video understanding. Specifically, we densely annotate multiplayer 3D gameplay videos at 1.22 labels/second, with time-synced, concurrent captions of states, actions, and events structured around a triadic system of Self, Other Agents, and the World, a natural decomposition for multi-agent environments. From these annotations, we refined 2.4K diagnostic QA pairs organized into three levels of cognitive complexity, accompanied by a structured distractor taxonomy that enables fine-grained analysis of where models hallucinate. Evaluation of frontier MLLMs reveals a substantial gap from human performance, with common failures in temporal and cross-video grounding, agent-role attribution, and handling the decision density of the game. We hope GameplayQA stimulates future research at the intersection of embodied AI, agentic perception, and world modeling.
GraphAllocBench: A Flexible Benchmark for Preference-Conditioned Multi-Objective Policy Learning
Jan 28, 2026Preference-Conditioned Policy Learning (PCPL) in Multi-Objective Reinforcement Learning (MORL) aims to approximate diverse Pareto-optimal solutions by conditioning policies on user-specified preferences over objectives. This enables a single model to flexibly adapt to arbitrary trade-offs at run-time by producing a policy on or near the Pareto front. However, existing benchmarks for PCPL are largely restricted to toy tasks and fixed environments, limiting their realism and scalability. To address this gap, we introduce GraphAllocBench, a flexible benchmark built on a novel graph-based resource allocation sandbox environment inspired by city management, which we call CityPlannerEnv. GraphAllocBench provides a rich suite of problems with diverse objective functions, varying preference conditions, and high-dimensional scalability. We also propose two new evaluation metrics -- Proportion of Non-Dominated Solutions (PNDS) and Ordering Score (OS) -- that directly capture preference consistency while complementing the widely used hypervolume metric. Through experiments with Multi-Layer Perceptrons (MLPs) and graph-aware models, we show that GraphAllocBench exposes the limitations of existing MORL approaches and paves the way for using graph-based methods such as Graph Neural Networks in complex, high-dimensional combinatorial allocation tasks. Beyond its predefined problem set, GraphAllocBench enables users to flexibly vary objectives, preferences, and allocation rules, establishing it as a versatile and extensible benchmark for advancing PCPL. Code: https://anonymous.4open.science/r/GraphAllocBench
Towards AI-Assisted Generation of Military Training Scenarios
Nov 10, 2025Achieving expert-level performance in simulation-based training relies on the creation of complex, adaptable scenarios, a traditionally laborious and resource intensive process. Although prior research explored scenario generation for military training, pre-LLM AI tools struggled to generate sufficiently complex or adaptable scenarios. This paper introduces a multi-agent, multi-modal reasoning framework that leverages Large Language Models (LLMs) to generate critical training artifacts, such as Operations Orders (OPORDs). We structure our framework by decomposing scenario generation into a hierarchy of subproblems, and for each one, defining the role of the AI tool: (1) generating options for a human author to select from, (2) producing a candidate product for human approval or modification, or (3) generating textual artifacts fully automatically. Our framework employs specialized LLM-based agents to address distinct subproblems. Each agent receives input from preceding subproblem agents, integrating both text-based scenario details and visual information (e.g., map features, unit positions and applies specialized reasoning to produce appropriate outputs. Subsequent agents process these outputs sequentially, preserving logical consistency and ensuring accurate document generation. This multi-agent strategy overcomes the limitations of basic prompting or single-agent approaches when tackling such highly complex tasks. We validate our framework through a proof-of-concept that generates the scheme of maneuver and movement section of an OPORD while estimating map positions and movements as a precursor demonstrating its feasibility and accuracy. Our results demonstrate the potential of LLM-driven multi-agent systems to generate coherent, nuanced documents and adapt dynamically to changing conditions, advancing automation in scenario generation for military training.
X-Ego: Acquiring Team-Level Tactical Situational Awareness via Cross-Egocentric Contrastive Video Representation Learning
Oct 22, 2025Human team tactics emerge from each player's individual perspective and their ability to anticipate, interpret, and adapt to teammates' intentions. While advances in video understanding have improved the modeling of team interactions in sports, most existing work relies on third-person broadcast views and overlooks the synchronous, egocentric nature of multi-agent learning. We introduce X-Ego-CS, a benchmark dataset consisting of 124 hours of gameplay footage from 45 professional-level matches of the popular e-sports game Counter-Strike 2, designed to facilitate research on multi-agent decision-making in complex 3D environments. X-Ego-CS provides cross-egocentric video streams that synchronously capture all players' first-person perspectives along with state-action trajectories. Building on this resource, we propose Cross-Ego Contrastive Learning (CECL), which aligns teammates' egocentric visual streams to foster team-level tactical situational awareness from an individual's perspective. We evaluate CECL on a teammate-opponent location prediction task, demonstrating its effectiveness in enhancing an agent's ability to infer both teammate and opponent positions from a single first-person view using state-of-the-art video encoders. Together, X-Ego-CS and CECL establish a foundation for cross-egocentric multi-agent benchmarking in esports. More broadly, our work positions gameplay understanding as a testbed for multi-agent modeling and tactical learning, with implications for spatiotemporal reasoning and human-AI teaming in both virtual and real-world domains. Code and dataset are available at https://github.com/HATS-ICT/x-ego.
Abstracting Geo-specific Terrains to Scale Up Reinforcement Learning
Mar 25, 2025Multi-agent reinforcement learning (MARL) is increasingly ubiquitous in training dynamic and adaptive synthetic characters for interactive simulations on geo-specific terrains. Frameworks such as Unity's ML-Agents help to make such reinforcement learning experiments more accessible to the simulation community. Military training simulations also benefit from advances in MARL, but they have immense computational requirements due to their complex, continuous, stochastic, partially observable, non-stationary, and doctrine-based nature. Furthermore, these simulations require geo-specific terrains, further exacerbating the computational resources problem. In our research, we leverage Unity's waypoints to automatically generate multi-layered representation abstractions of the geo-specific terrains to scale up reinforcement learning while still allowing the transfer of learned policies between different representations. Our early exploratory results on a novel MARL scenario, where each side has differing objectives, indicate that waypoint-based navigation enables faster and more efficient learning while producing trajectories similar to those taken by expert human players in CSGO gaming environments. This research points out the potential of waypoint-based navigation for reducing the computational costs of developing and training MARL models for military training simulations, where geo-specific terrains and differing objectives are crucial.
Spontaneous Theory of Mind for Artificial Intelligence
Feb 16, 2024Existing approaches to Theory of Mind (ToM) in Artificial Intelligence (AI) overemphasize prompted, or cue-based, ToM, which may limit our collective ability to develop Artificial Social Intelligence (ASI). Drawing from research in computer science, cognitive science, and related disciplines, we contrast prompted ToM with what we call spontaneous ToM -- reasoning about others' mental states that is grounded in unintentional, possibly uncontrollable cognitive functions. We argue for a principled approach to studying and developing AI ToM and suggest that a robust, or general, ASI will respond to prompts \textit{and} spontaneously engage in social reasoning.
Controlling Synthetic Characters in Simulations: A Case for Cognitive Architectures and Sigma
Jan 06, 2021



Simulations, along with other similar applications like virtual worlds and video games, require computational models of intelligence that generate realistic and credible behavior for the participating synthetic characters. Cognitive architectures, which are models of the fixed structure underlying intelligent behavior in both natural and artificial systems, provide a conceptually valid common basis, as evidenced by the current efforts towards a standard model of the mind, to generate human-like intelligent behavior for these synthetic characters. Sigma is a cognitive architecture and system that strives to combine what has been learned from four decades of independent work on symbolic cognitive architectures, probabilistic graphical models, and more recently neural models, under its graphical architecture hypothesis. Sigma leverages an extended form of factor graphs towards a uniform grand unification of not only traditional cognitive capabilities but also key non-cognitive aspects, creating unique opportunities for the construction of new kinds of cognitive models that possess a Theory-of-Mind and that are perceptual, autonomous, interactive, affective, and adaptive. In this paper, we will introduce Sigma along with its diverse capabilities and then use three distinct proof-of-concept Sigma models to highlight combinations of these capabilities: (1) Distributional reinforcement learning models in; (2) A pair of adaptive and interactive agent models that demonstrate rule-based, probabilistic, and social reasoning; and (3) A knowledge-free exploration model in which an agent leverages only architectural appraisal variables, namely attention and curiosity, to locate an item while building up a map in a Unity environment.
Adaptive Synthetic Characters for Military Training
Jan 06, 2021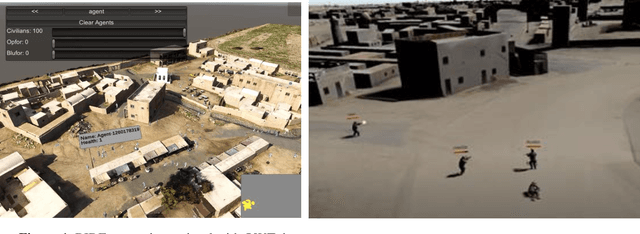
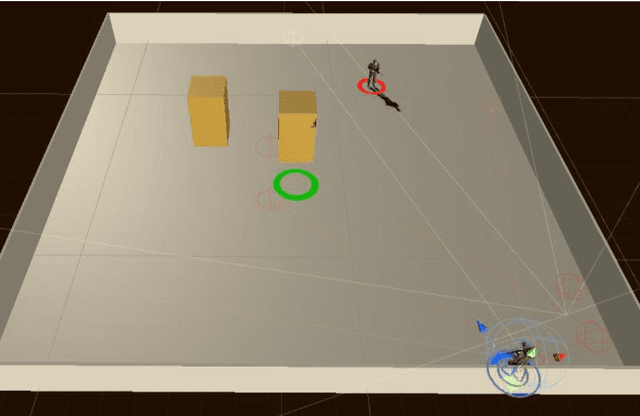
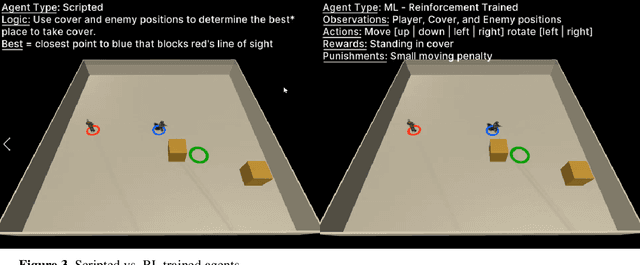
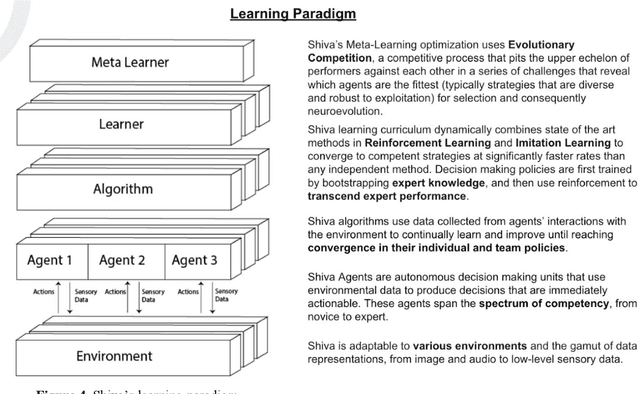
Behaviors of the synthetic characters in current military simulations are limited since they are generally generated by rule-based and reactive computational models with minimal intelligence. Such computational models cannot adapt to reflect the experience of the characters, resulting in brittle intelligence for even the most effective behavior models devised via costly and labor-intensive processes. Observation-based behavior model adaptation that leverages machine learning and the experience of synthetic entities in combination with appropriate prior knowledge can address the issues in the existing computational behavior models to create a better training experience in military training simulations. In this paper, we introduce a framework that aims to create autonomous synthetic characters that can perform coherent sequences of believable behavior while being aware of human trainees and their needs within a training simulation. This framework brings together three mutually complementary components. The first component is a Unity-based simulation environment - Rapid Integration and Development Environment (RIDE) - supporting One World Terrain (OWT) models and capable of running and supporting machine learning experiments. The second is Shiva, a novel multi-agent reinforcement and imitation learning framework that can interface with a variety of simulation environments, and that can additionally utilize a variety of learning algorithms. The final component is the Sigma Cognitive Architecture that will augment the behavior models with symbolic and probabilistic reasoning capabilities. We have successfully created proof-of-concept behavior models leveraging this framework on realistic terrain as an essential step towards bringing machine learning into military simulations.
Outperforming Word2Vec on Analogy Tasks with Random Projections
Feb 17, 2015We present a distributed vector representation based on a simplification of the BEAGLE system, designed in the context of the Sigma cognitive architecture. Our method does not require gradient-based training of neural networks, matrix decompositions as with LSA, or convolutions as with BEAGLE. All that is involved is a sum of random vectors and their pointwise products. Despite the simplicity of this technique, it gives state-of-the-art results on analogy problems, in most cases better than Word2Vec. To explain this success, we interpret it as a dimension reduction via random projection.