 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards AI-Assisted Generation of Military Training Scenarios
Nov 10, 2025Achieving expert-level performance in simulation-based training relies on the creation of complex, adaptable scenarios, a traditionally laborious and resource intensive process. Although prior research explored scenario generation for military training, pre-LLM AI tools struggled to generate sufficiently complex or adaptable scenarios. This paper introduces a multi-agent, multi-modal reasoning framework that leverages Large Language Models (LLMs) to generate critical training artifacts, such as Operations Orders (OPORDs). We structure our framework by decomposing scenario generation into a hierarchy of subproblems, and for each one, defining the role of the AI tool: (1) generating options for a human author to select from, (2) producing a candidate product for human approval or modification, or (3) generating textual artifacts fully automatically. Our framework employs specialized LLM-based agents to address distinct subproblems. Each agent receives input from preceding subproblem agents, integrating both text-based scenario details and visual information (e.g., map features, unit positions and applies specialized reasoning to produce appropriate outputs. Subsequent agents process these outputs sequentially, preserving logical consistency and ensuring accurate document generation. This multi-agent strategy overcomes the limitations of basic prompting or single-agent approaches when tackling such highly complex tasks. We validate our framework through a proof-of-concept that generates the scheme of maneuver and movement section of an OPORD while estimating map positions and movements as a precursor demonstrating its feasibility and accuracy. Our results demonstrate the potential of LLM-driven multi-agent systems to generate coherent, nuanced documents and adapt dynamically to changing conditions, advancing automation in scenario generation for military training.
X-Ego: Acquiring Team-Level Tactical Situational Awareness via Cross-Egocentric Contrastive Video Representation Learning
Oct 22, 2025Human team tactics emerge from each player's individual perspective and their ability to anticipate, interpret, and adapt to teammates' intentions. While advances in video understanding have improved the modeling of team interactions in sports, most existing work relies on third-person broadcast views and overlooks the synchronous, egocentric nature of multi-agent learning. We introduce X-Ego-CS, a benchmark dataset consisting of 124 hours of gameplay footage from 45 professional-level matches of the popular e-sports game Counter-Strike 2, designed to facilitate research on multi-agent decision-making in complex 3D environments. X-Ego-CS provides cross-egocentric video streams that synchronously capture all players' first-person perspectives along with state-action trajectories. Building on this resource, we propose Cross-Ego Contrastive Learning (CECL), which aligns teammates' egocentric visual streams to foster team-level tactical situational awareness from an individual's perspective. We evaluate CECL on a teammate-opponent location prediction task, demonstrating its effectiveness in enhancing an agent's ability to infer both teammate and opponent positions from a single first-person view using state-of-the-art video encoders. Together, X-Ego-CS and CECL establish a foundation for cross-egocentric multi-agent benchmarking in esports. More broadly, our work positions gameplay understanding as a testbed for multi-agent modeling and tactical learning, with implications for spatiotemporal reasoning and human-AI teaming in both virtual and real-world domains. Code and dataset are available at https://github.com/HATS-ICT/x-ego.
Abstracting Geo-specific Terrains to Scale Up Reinforcement Learning
Mar 25, 2025Multi-agent reinforcement learning (MARL) is increasingly ubiquitous in training dynamic and adaptive synthetic characters for interactive simulations on geo-specific terrains. Frameworks such as Unity's ML-Agents help to make such reinforcement learning experiments more accessible to the simulation community. Military training simulations also benefit from advances in MARL, but they have immense computational requirements due to their complex, continuous, stochastic, partially observable, non-stationary, and doctrine-based nature. Furthermore, these simulations require geo-specific terrains, further exacerbating the computational resources problem. In our research, we leverage Unity's waypoints to automatically generate multi-layered representation abstractions of the geo-specific terrains to scale up reinforcement learning while still allowing the transfer of learned policies between different representations. Our early exploratory results on a novel MARL scenario, where each side has differing objectives, indicate that waypoint-based navigation enables faster and more efficient learning while producing trajectories similar to those taken by expert human players in CSGO gaming environments. This research points out the potential of waypoint-based navigation for reducing the computational costs of developing and training MARL models for military training simulations, where geo-specific terrains and differing objectives are crucial.
Analysis and Adaptation of YOLOv4 for Object Detection in Aerial Images
Mar 18, 2022
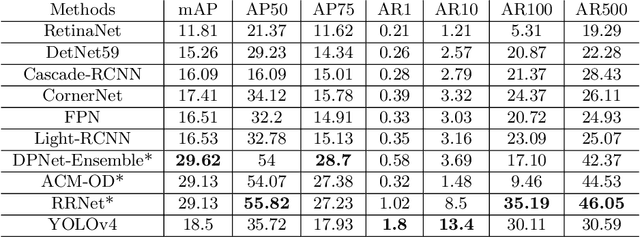
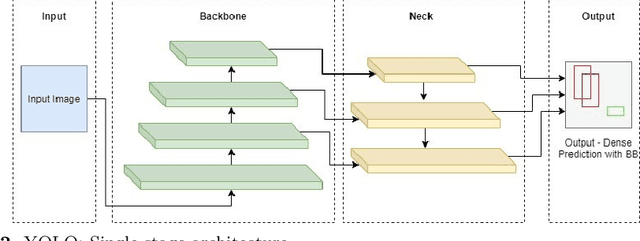
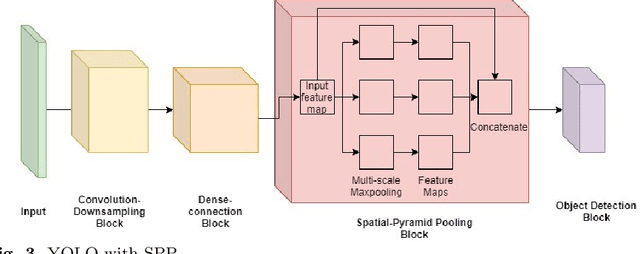
The recent and rapid growth in Unmanned Aerial Vehicles (UAVs) deployment for various computer vision tasks has paved the path for numerous opportunities to make them more effective and valuable. Object detection in aerial images is challenging due to variations in appearance, pose, and scale. Autonomous aerial flight systems with their inherited limited memory and computational power demand accurate and computationally efficient detection algorithms for real-time applications. Our work shows the adaptation of the popular YOLOv4 framework for predicting the objects and their locations in aerial images with high accuracy and inference speed. We utilized transfer learning for faster convergence of the model on the VisDrone DET aerial object detection dataset. The trained model resulted in a mean average precision (mAP) of 45.64% with an inference speed reaching 8.7 FPS on the Tesla K80 GPU and was highly accurate in detecting truncated and occluded objects. We experimentally evaluated the impact of varying network resolution sizes and training epochs on the performance. A comparative study with several contemporary aerial object detectors proved that YOLOv4 performed better, implying a more suitable detection algorithm to incorporate on aerial platforms.