 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis and Adaptation of YOLOv4 for Object Detection in Aerial Images
Paper and Code
Mar 18, 2022
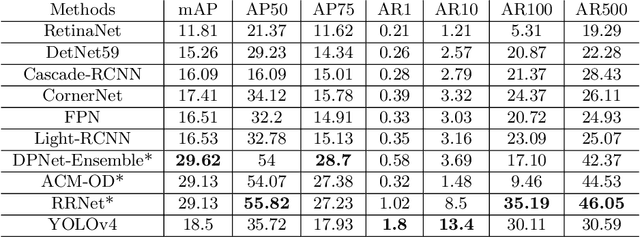
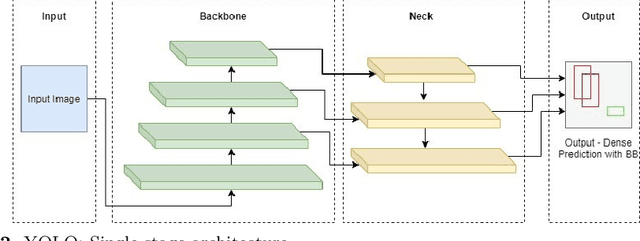
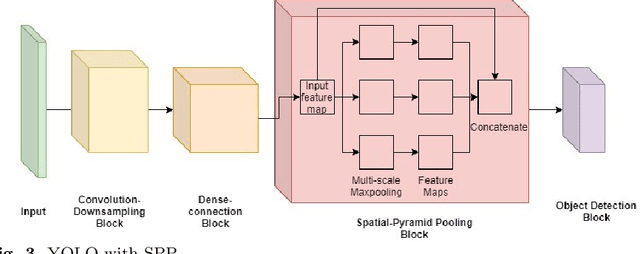
The recent and rapid growth in Unmanned Aerial Vehicles (UAVs) deployment for various computer vision tasks has paved the path for numerous opportunities to make them more effective and valuable. Object detection in aerial images is challenging due to variations in appearance, pose, and scale. Autonomous aerial flight systems with their inherited limited memory and computational power demand accurate and computationally efficient detection algorithms for real-time applications. Our work shows the adaptation of the popular YOLOv4 framework for predicting the objects and their locations in aerial images with high accuracy and inference speed. We utilized transfer learning for faster convergence of the model on the VisDrone DET aerial object detection dataset. The trained model resulted in a mean average precision (mAP) of 45.64% with an inference speed reaching 8.7 FPS on the Tesla K80 GPU and was highly accurate in detecting truncated and occluded objects. We experimentally evaluated the impact of varying network resolution sizes and training epochs on the performance. A comparative study with several contemporary aerial object detectors proved that YOLOv4 performed better, implying a more suitable detection algorithm to incorporate on aerial platforms.