 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Synthetic Characters for Military Training
Paper and Code
Jan 06, 2021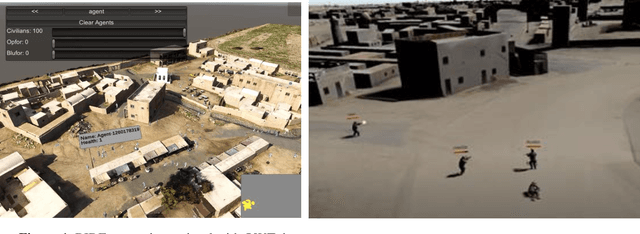
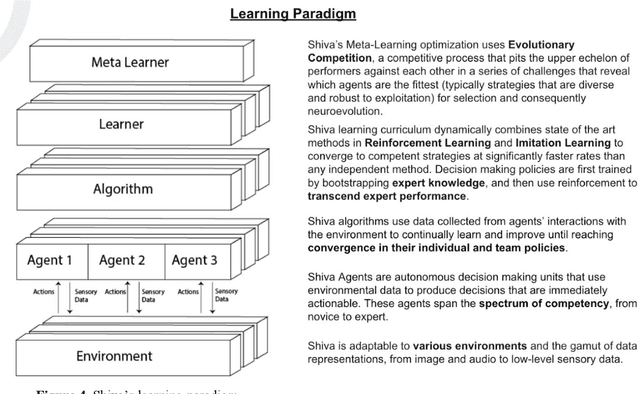
Behaviors of the synthetic characters in current military simulations are limited since they are generally generated by rule-based and reactive computational models with minimal intelligence. Such computational models cannot adapt to reflect the experience of the characters, resulting in brittle intelligence for even the most effective behavior models devised via costly and labor-intensive processes. Observation-based behavior model adaptation that leverages machine learning and the experience of synthetic entities in combination with appropriate prior knowledge can address the issues in the existing computational behavior models to create a better training experience in military training simulations. In this paper, we introduce a framework that aims to create autonomous synthetic characters that can perform coherent sequences of believable behavior while being aware of human trainees and their needs within a training simulation. This framework brings together three mutually complementary components. The first component is a Unity-based simulation environment - Rapid Integration and Development Environment (RIDE) - supporting One World Terrain (OWT) models and capable of running and supporting machine learning experiments. The second is Shiva, a novel multi-agent reinforcement and imitation learning framework that can interface with a variety of simulation environments, and that can additionally utilize a variety of learning algorithms. The final component is the Sigma Cognitive Architecture that will augment the behavior models with symbolic and probabilistic reasoning capabilities. We have successfully created proof-of-concept behavior models leveraging this framework on realistic terrain as an essential step towards bringing machine learning into military simulations.