 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Multi-Target Detection and Tracking with mmWave 5G NR Waveforms on RFSoC
Dec 27, 2025We demonstrate a real-time implementation of multi-target detection and tracking using 5G New Radio (NR) physical downlink shared channel (PDSCH) waveform with 400 MHz bandwidth at 28 GHz carrier frequency. The hardware platform is built on a radio frequency system-on-chip (RFSoC) 4x2 board connected with a pair of Sivers EVK02001 mmWave beamformers for transmission and reception. The entire sensing transceiver processing and fast beam control are realized purely in the programmable logic (PL) part of the RFSoC, enabling low-latency and fully hardware-accelerated operation. The continuously acquired sensing data constitute 3D range-angle (RA) tensors, which are processed on a host PC using adaptive background subtraction, cell-averaging constant false alarm rate (CA-CFAR) detection with density-based spatial clustering of applications with noise (DBSCAN) clustering, and extended Kalman filtering (EKF), to detect and track targets in the environment. Our software-defined radio (SDR) testbed integrates heterogeneous computing resources, including CPUs, GPUs, and FPGAs, thereby providing design flexibility for a wide range of tasks.
Variational Secret Common Randomness Extraction
Oct 02, 2025This paper studies the problem of extracting common randomness (CR) or secret keys from correlated random sources observed by two legitimate parties, Alice and Bob, through public discussion in the presence of an eavesdropper, Eve. We propose a practical two-stage CR extraction framework. In the first stage, the variational probabilistic quantization (VPQ) step is introduced, where Alice and Bob employ probabilistic neural network (NN) encoders to map their observations into discrete, nearly uniform random variables (RVs) with high agreement probability while minimizing information leakage to Eve. This is realized through a variational learning objective combined with adversarial training. In the second stage, a secure sketch using code-offset construction reconciles the encoder outputs into identical secret keys, whose secrecy is guaranteed by the VPQ objective. As a representative application, we study physical layer key (PLK) generation. Beyond the traditional methods, which rely on the channel reciprocity principle and require two-way channel probing, thus suffering from large protocol overhead and being unsuitable in high mobility scenarios, we propose a sensing-based PLK generation method for integrated sensing and communications (ISAC) systems, where paired range-angle (RA) maps measured at Alice and Bob serve as correlated sources. The idea is verified through both end-to-end simulations and real-world software-defined radio (SDR) measurements, including scenarios where Eve has partial knowledge about Bob's position. The results demonstrate the feasibility and convincing performance of both the proposed CR extraction framework and sensing-based PLK generation method.
Computation of Capacity-Distortion-Cost Functions for Continuous Memoryless Channels
Apr 28, 2025


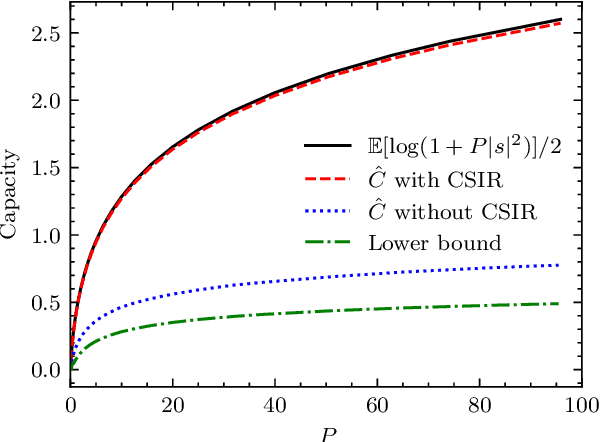
This paper aims at computing the capacity-distortion-cost (CDC) function for continuous memoryless channels, which is defined as the supremum of the mutual information between channel input and output, constrained by an input cost and an expected distortion of estimating channel state. Solving the optimization problem is challenging because the input distribution does not lie in a finite-dimensional Euclidean space and the optimal estimation function has no closed form in general. We propose to adopt the Wasserstein proximal point method and parametric models such as neural networks (NNs) to update the input distribution and estimation function alternately. To implement it in practice, the importance sampling (IS) technique is used to calculate integrals numerically, and the Wasserstein gradient descent is approximated by pushing forward particles. The algorithm is then applied to an integrated sensing and communications (ISAC) system, validating theoretical results at minimum and maximum distortion as well as the random-deterministic trade-off.
$SE(3)$-Based Trajectory Optimization and Target Tracking in UAV-Enabled ISAC Systems
Jan 20, 2025


This paper introduces a novel approach to enhance the performance of UAV-enabled integrated sensing and communication (ISAC) systems. By integrating uniform planar arrays (UPAs) and modeling the UAV as a rigid body using $SE(3)$, the study addresses key challenges in existing ISAC frameworks, such as rigid-body dynamics and trajectory design. We propose a target tracking scheme based on extended Kalman filtering (EKF) in $SE(3)$ and trajectory optimization from a control signal design perspective, leveraging the conditional Posterior Cramer-Rao bound (CPCRB) to optimize performance. Numerical results demonstrate the effectiveness of the proposed method in improving target tracking and trajectory optimization for a UAV-enabled MIMO-OFDM ISAC system.
Computing Capacity-Cost Functions for Continuous Channels in Wasserstein Space
Jan 18, 2025

This paper investigates the problem of computing capacity-cost (C-C) functions for continuous channels. Motivated by the Kullback-Leibler divergence (KLD) proximal reformulation of the classical Blahut-Arimoto (BA) algorithm, the Wasserstein distance is introduced to the proximal term for the continuous case, resulting in an iterative algorithm related to the Wasserstein gradient descent. Practical implementation involves moving particles along the negative gradient direction of the objective function's first variation in the Wasserstein space and approximating integrals by the importance sampling (IS) technique. Such formulation is also applied to the rate-distortion (R-D) function for continuous source spaces and thus provides a unified computation framework for both problems.
Deep-Unrolling Multidimensional Harmonic Retrieval Algorithms on Neuromorphic Hardware
Dec 05, 2024



This paper explores the potential of conversion-based neuromorphic algorithms for highly accurate and energy-efficient single-snapshot multidimensional harmonic retrieval (MHR). By casting the MHR problem as a sparse recovery problem, we devise the currently proposed, deep-unrolling-based Structured Learned Iterative Shrinkage and Thresholding (S-LISTA) algorithm to solve it efficiently using complex-valued convolutional neural networks with complex-valued activations, which are trained using a supervised regression objective. Afterward, a novel method for converting the complex-valued convolutional layers and activations into spiking neural networks (SNNs) is developed. At the heart of this method lies the recently proposed Few Spikes (FS) conversion, which is extended by modifying the neuron model's parameters and internal dynamics to account for the inherent coupling between real and imaginary parts in complex-valued computations. Finally, the converted SNNs are mapped onto the SpiNNaker2 neuromorphic board, and a comparison in terms of estimation accuracy and power efficiency between the original CNNs deployed on an NVIDIA Jetson Xavier and the SNNs is being conducted. The measurement results show that the converted SNNs achieve almost five-fold power efficiency at moderate performance loss compared to the original CNNs.
R-MTLLMF: Resilient Multi-Task Large Language Model Fusion at the Wireless Edge
Nov 27, 2024



Multi-task large language models (MTLLMs) are important for many applications at the wireless edge, where users demand specialized models to handle multiple tasks efficiently. However, training MTLLMs is complex and exhaustive, particularly when tasks are subject to change. Recently, the concept of model fusion via task vectors has emerged as an efficient approach for combining fine-tuning parameters to produce an MTLLM. In this paper, the problem of enabling edge users to collaboratively craft such MTTLMs via tasks vectors is studied, under the assumption of worst-case adversarial attacks. To this end, first the influence of adversarial noise to multi-task model fusion is investigated and a relationship between the so-called weight disentanglement error and the mean squared error (MSE) is derived. Using hypothesis testing, it is directly shown that the MSE increases interference between task vectors, thereby rendering model fusion ineffective. Then, a novel resilient MTLLM fusion (R-MTLLMF) is proposed, which leverages insights about the LLM architecture and fine-tuning process to safeguard task vector aggregation under adversarial noise by realigning the MTLLM. The proposed R-MTLLMF is then compared for both worst-case and ideal transmission scenarios to study the impact of the wireless channel. Extensive model fusion experiments with vision LLMs demonstrate R-MTLLMF's effectiveness, achieving close-to-baseline performance across eight different tasks in ideal noise scenarios and significantly outperforming unprotected model fusion in worst-case scenarios. The results further advocate for additional physical layer protection for a holistic approach to resilience, from both a wireless and LLM perspective.
SCoTT: Wireless-Aware Path Planning with Vision Language Models and Strategic Chains-of-Thought
Nov 27, 2024



Path planning is a complex problem for many practical applications, particularly in robotics. Existing algorithms, however, are exhaustive in nature and become increasingly complex when additional side constraints are incorporated alongside distance minimization. In this paper, a novel approach using vision language models (VLMs) is proposed for enabling path planning in complex wireless-aware environments. To this end, insights from a digital twin (DT) with real-world wireless ray tracing data are explored in order to guarantee an average path gain threshold while minimizing the trajectory length. First, traditional approaches such as A* are compared to several wireless-aware extensions, and an optimal iterative dynamic programming approach (DP-WA*) is derived, which fully takes into account all path gains and distance metrics within the DT. On the basis of these baselines, the role of VLMs as an alternative assistant for path planning is investigated, and a strategic chain-of-thought tasking (SCoTT) approach is proposed. SCoTT divides the complex planning task into several subproblems and solves each with advanced CoT prompting. Results show that SCoTT achieves very close average path gains compared to DP-WA* while at the same time yielding consistently shorter path lengths. The results also show that VLMs can be used to accelerate DP-WA* by efficiently reducing the algorithm's search space and thus saving up to 62\% in execution time. This work underscores the potential of VLMs in future digital systems as capable assistants for solving complex tasks, while enhancing user interaction and accelerating rapid prototyping under diverse wireless constraints.
R-SFLLM: Jamming Resilient Framework for Split Federated Learning with Large Language Models
Jul 16, 2024



Split federated learning (SFL) is a compute-efficient paradigm in distributed machine learning (ML), where components of large ML models are outsourced to remote servers. A significant challenge in SFL, particularly when deployed over wireless channels, is the susceptibility of transmitted model parameters to adversarial jamming that could jeopardize the learning process. This is particularly pronounced for word embedding parameters in large language models (LLMs), which are crucial for language understanding. In this paper, rigorous insights are provided into the influence of jamming LLM word embeddings in SFL by deriving an expression for the ML training loss divergence and showing that it is upper-bounded by the mean squared error (MSE). Based on this analysis, a physical layer framework is developed for resilient SFL with LLMs (R-SFLLM) over wireless networks. R-SFLLM leverages wireless sensing data to gather information on the jamming directions-of-arrival (DoAs) for the purpose of devising a novel, sensing-assisted anti-jamming strategy while jointly optimizing beamforming, user scheduling, and resource allocation. Extensive experiments using BERT and RoBERTa models demonstrate R-SFLLM's effectiveness, achieving close-to-baseline performance across various natural language processing (NLP) tasks and datasets. The proposed methodology further introduces an adversarial training component, where controlled noise exposure significantly enhances the LLM's resilience to perturbed parameters during training. The results show that more noise-sensitive models, such as RoBERTa, benefit from this feature, especially when resource allocation is unfair. It is also shown that worst-case jamming in particular translates into worst-case model outcomes, thereby necessitating the need for jamming-resilient SFL protocols.
Resilient-By-Design Framework for MIMO-OFDM Communications under Smart Jamming
Apr 16, 2024

Native jamming mitigation is essential for addressing security and resilience in future 6G wireless networks. In this paper a resilient-by-design framework for effective anti-jamming in MIMO-OFDM wireless communications is introduced. A novel approach that integrates information from wireless sensing services to develop anti-jamming strategies, which do not rely on any prior information or assumptions on the adversary's concrete setup, is explored. To this end, a method that replaces conventional approaches to noise covariance estimation in anti-jamming with a surrogate covariance model is proposed, which instead incorporates sensing information on the jamming signal's directions-of-arrival (DoAs) to provide an effective approximation of the true jamming strategy. The study further focuses on integrating this novel, sensing-assisted approach into the joint optimization of beamforming, user scheduling and power allocation for a multi-user MIMO-OFDM uplink setting. Despite the NP-hard nature of this optimization problem, it can be effectively solved using an iterative water-filling approach. In order to assess the effectiveness of the proposed sensing-assisted jamming mitigation, the corresponding worst-case jamming strategy is investigated, which aims to minimize the total user sum-rate. Experimental simulations eventually affirm the robustness of our approach against both worst-case and barrage jamming, demonstrating its potential to address a wide range of jamming scenarios. Since such an integration of sensing-assisted information is directly implemented on the physical layer, resilience is incorporated preemptively by-design.