 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-Context Learning for Label-Efficient Cancer Image Classification in Oncology
May 08, 2025The application of AI in oncology has been limited by its reliance on large, annotated datasets and the need for retraining models for domain-specific diagnostic tasks. Taking heed of these limitations, we investigated in-context learning as a pragmatic alternative to model retraining by allowing models to adapt to new diagnostic tasks using only a few labeled examples at inference, without the need for retraining. Using four vision-language models (VLMs)-Paligemma, CLIP, ALIGN and GPT-4o, we evaluated the performance across three oncology datasets: MHIST, PatchCamelyon and HAM10000. To the best of our knowledge, this is the first study to compare the performance of multiple VLMs on different oncology classification tasks. Without any parameter updates, all models showed significant gains with few-shot prompting, with GPT-4o reaching an F1 score of 0.81 in binary classification and 0.60 in multi-class classification settings. While these results remain below the ceiling of fully fine-tuned systems, they highlight the potential of ICL to approximate task-specific behavior using only a handful of examples, reflecting how clinicians often reason from prior cases. Notably, open-source models like Paligemma and CLIP demonstrated competitive gains despite their smaller size, suggesting feasibility for deployment in computing constrained clinical environments. Overall, these findings highlight the potential of ICL as a practical solution in oncology, particularly for rare cancers and resource-limited contexts where fine-tuning is infeasible and annotated data is difficult to obtain.
A Vision-based System for Traffic Anomaly Detection using Deep Learning and Decision Trees
Apr 14, 2021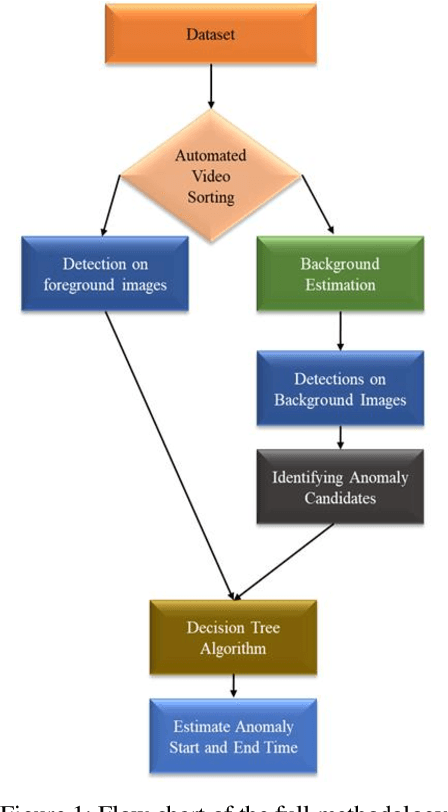
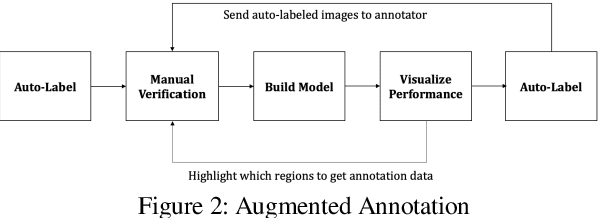
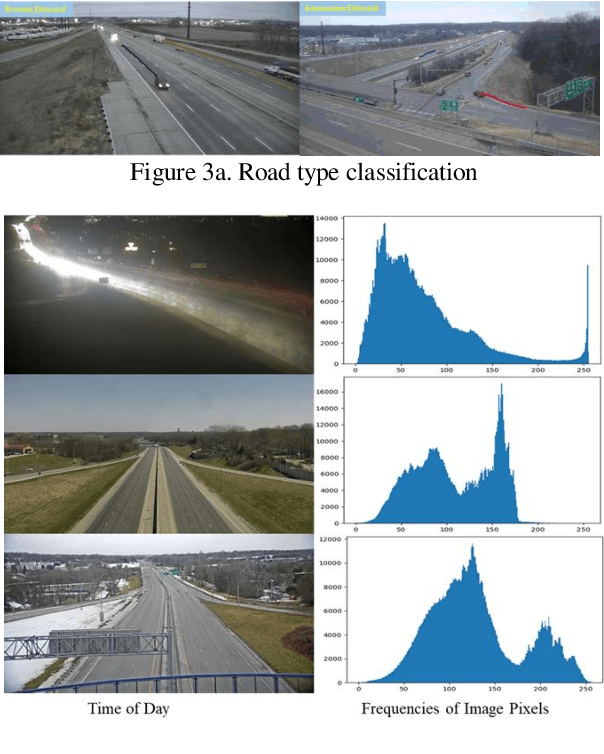
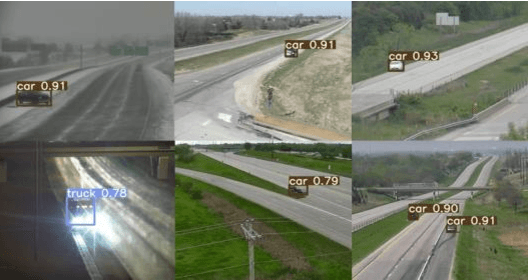
Any intelligent traffic monitoring system must be able to detect anomalies such as traffic accidents in real time. In this paper, we propose a Decision-Tree - enabled approach powered by Deep Learning for extracting anomalies from traffic cameras while accurately estimating the start and end time of the anomalous event. Our approach included creating a detection model, followed by anomaly detection and analysis. YOLOv5 served as the foundation for our detection model. The anomaly detection and analysis step entail traffic scene background estimation, road mask extraction, and adaptive thresholding. Candidate anomalies were passed through a decision tree to detect and analyze final anomalies. The proposed approach yielded an F1 score of 0.8571, and an S4 score of 0.5686, per the experimental validation.
Deep Learning Frameworks for Pavement Distress Classification: A Comparative Analysis
Oct 21, 2020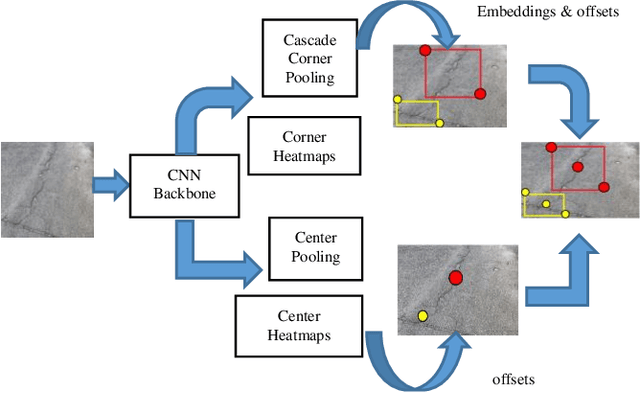
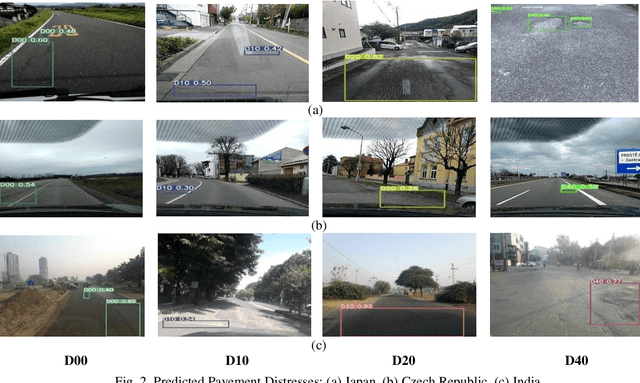
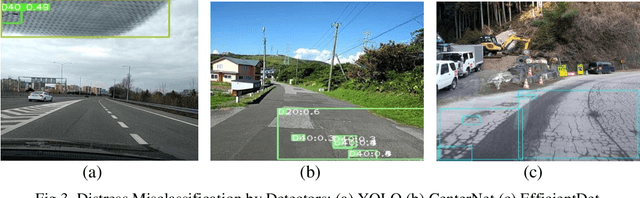

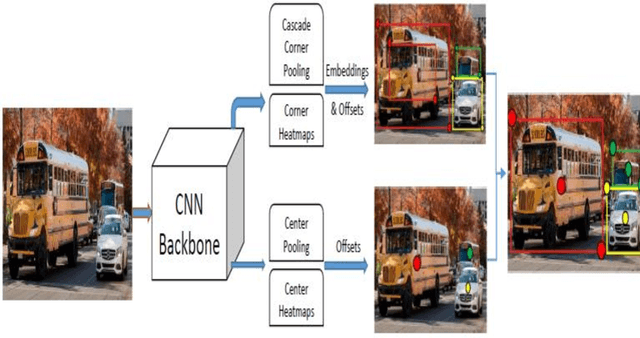
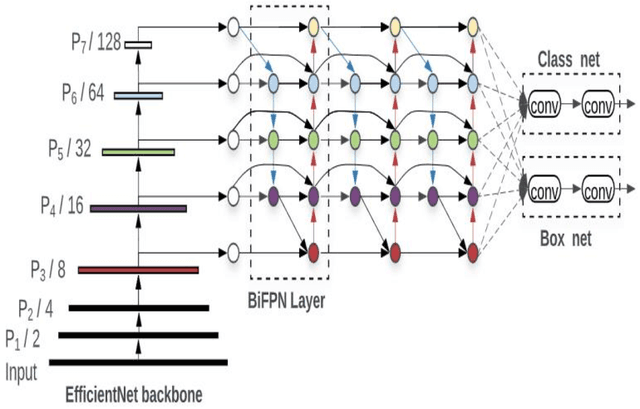
Automatic detection and classification of pavement distresses is critical in timely maintaining and rehabilitating pavement surfaces. With the evolution of deep learning and high performance computing, the feasibility of vision-based pavement defect assessments has significantly improved. In this study, the authors deploy state-of-the-art deep learning algorithms based on different network backbones to detect and characterize pavement distresses. The influence of different backbone models such as CSPDarknet53, Hourglass-104 and EfficientNet were studied to evaluate their classification performance. The models were trained using 21,041 images captured across urban and rural streets of Japan, Czech Republic and India. Finally, the models were assessed based on their ability to predict and classify distresses, and tested using F1 score obtained from the statistical precision and recall values. The best performing model achieved an F1 score of 0.58 and 0.57 on two test datasets released by the IEEE Global Road Damage Detection Challenge. The source code including the trained models are made available at [1].
Artificial Intelligence Enabled Traffic Monitoring System
Oct 02, 2020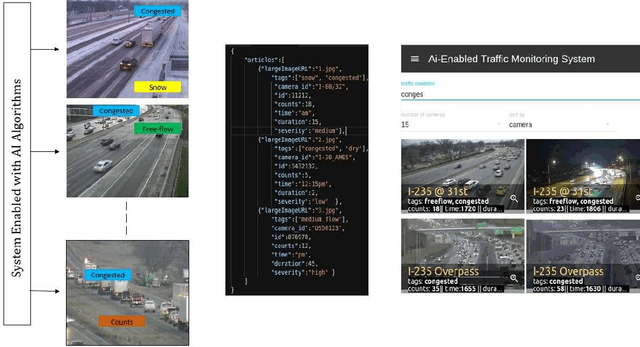
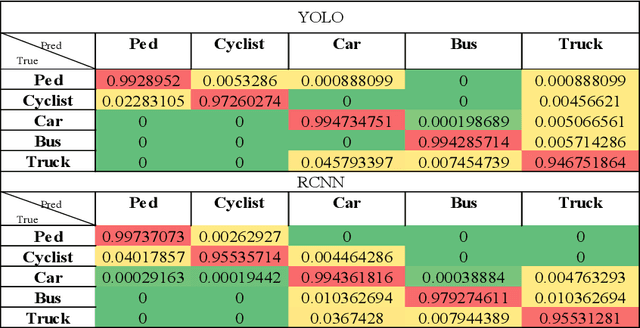
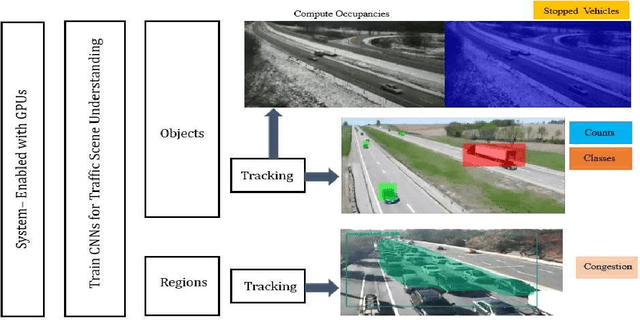
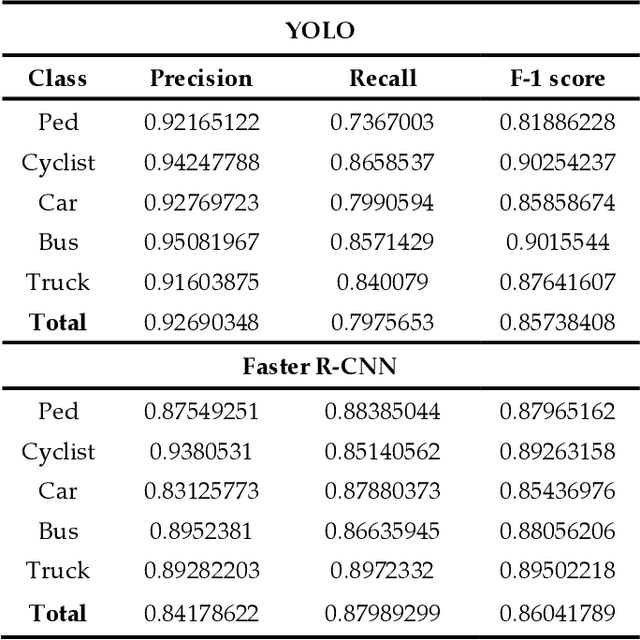
Manual traffic surveillance can be a daunting task as Traffic Management Centers operate a myriad of cameras installed over a network. Injecting some level of automation could help lighten the workload of human operators performing manual surveillance and facilitate making proactive decisions which would reduce the impact of incidents and recurring congestion on roadways. This article presents a novel approach to automatically monitor real time traffic footage using deep convolutional neural networks and a stand-alone graphical user interface. The authors describe the results of research received in the process of developing models that serve as an integrated framework for an artificial intelligence enabled traffic monitoring system. The proposed system deploys several state-of-the-art deep learning algorithms to automate different traffic monitoring needs. Taking advantage of a large database of annotated video surveillance data, deep learning-based models are trained to detect queues, track stationary vehicles, and tabulate vehicle counts. A pixel-level segmentation approach is applied to detect traffic queues and predict severity. Real-time object detection algorithms coupled with different tracking systems are deployed to automatically detect stranded vehicles as well as perform vehicular counts. At each stages of development, interesting experimental results are presented to demonstrate the effectiveness of the proposed system. Overall, the results demonstrate that the proposed framework performs satisfactorily under varied conditions without being immensely impacted by environmental hazards such as blurry camera views, low illumination, rain, or snow.
Object Detection and Tracking Algorithms for Vehicle Counting: A Comparative Analysis
Jul 31, 2020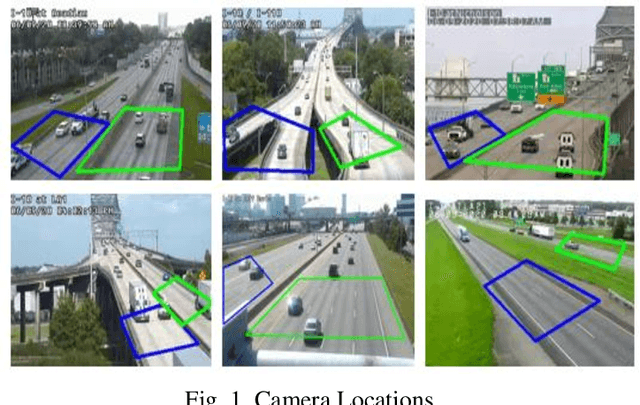
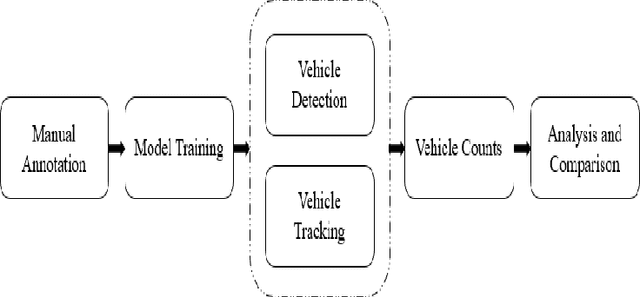
The rapid advancement in the field of deep learning and high performance computing has highly augmented the scope of video based vehicle counting system. In this paper, the authors deploy several state of the art object detection and tracking algorithms to detect and track different classes of vehicles in their regions of interest (ROI). The goal of correctly detecting and tracking vehicles' in their ROI is to obtain an accurate vehicle count. Multiple combinations of object detection models coupled with different tracking systems are applied to access the best vehicle counting framework. The models' addresses challenges associated to different weather conditions, occlusion and low-light settings and efficiently extracts vehicle information and trajectories through its computationally rich training and feedback cycles. The automatic vehicle counts resulting from all the model combinations are validated and compared against the manually counted ground truths of over 9 hours' traffic video data obtained from the Louisiana Department of Transportation and Development. Experimental results demonstrate that the combination of CenterNet and Deep SORT, Detectron2 and Deep SORT, and YOLOv4 and Deep SORT produced the best overall counting percentage for all vehicles.