 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Autonomous Driving: A Survey
Feb 02, 2020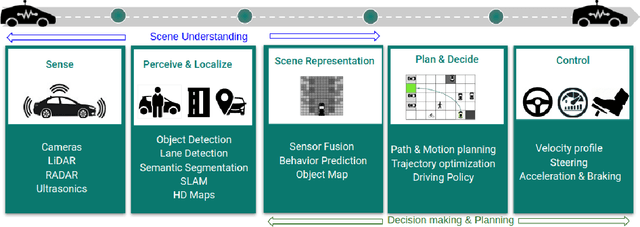
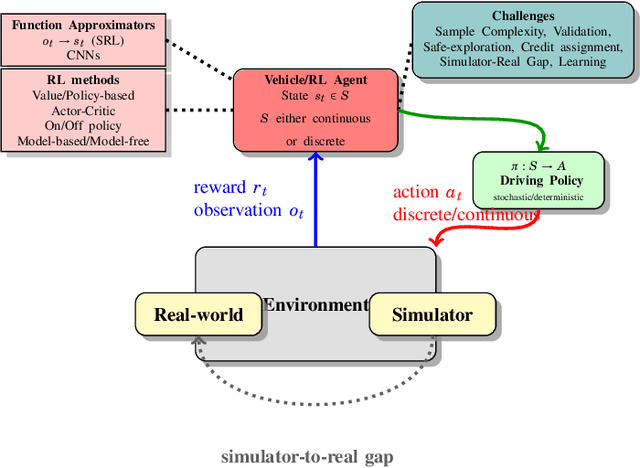
With the development of deep representation learning, the domain of reinforcement learning (RL) has become a powerful learning framework now capable of learning complex policies in high dimensional environments. This review summarises deep reinforcement learning (DRL) algorithms, provides a taxonomy of automated driving tasks where (D)RL methods have been employed, highlights the key challenges algorithmically as well as in terms of deployment of real world autonomous driving agents, the role of simulators in training agents, and finally methods to evaluate, test and robustifying existing solutions in RL and imitation learning.
Exploring applications of deep reinforcement learning for real-world autonomous driving systems
Jan 16, 2019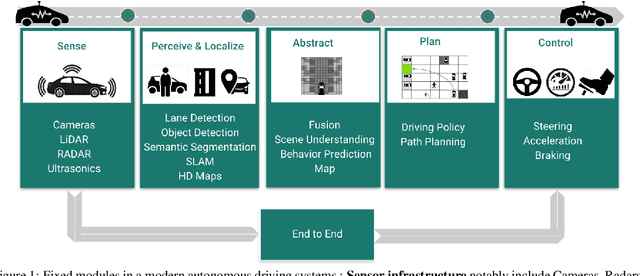
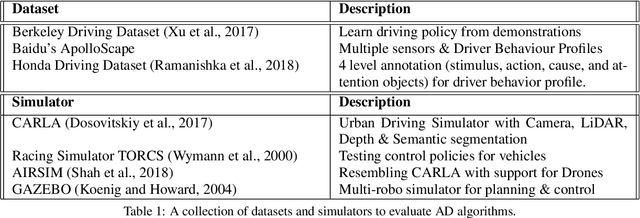
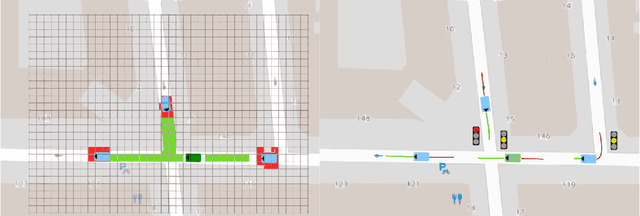
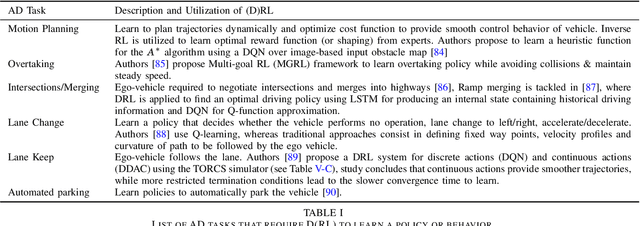
Deep Reinforcement Learning (DRL) has become increasingly powerful in recent years, with notable achievements such as Deepmind's AlphaGo. It has been successfully deployed in commercial vehicles like Mobileye's path planning system. However, a vast majority of work on DRL is focused on toy examples in controlled synthetic car simulator environments such as TORCS and CARLA. In general, DRL is still at its infancy in terms of usability in real-world applications. Our goal in this paper is to encourage real-world deployment of DRL in various autonomous driving (AD) applications. We first provide an overview of the tasks in autonomous driving systems, reinforcement learning algorithms and applications of DRL to AD systems. We then discuss the challenges which must be addressed to enable further progress towards real-world deployment.
Real-time Dynamic Object Detection for Autonomous Driving using Prior 3D-Maps
Sep 28, 2018
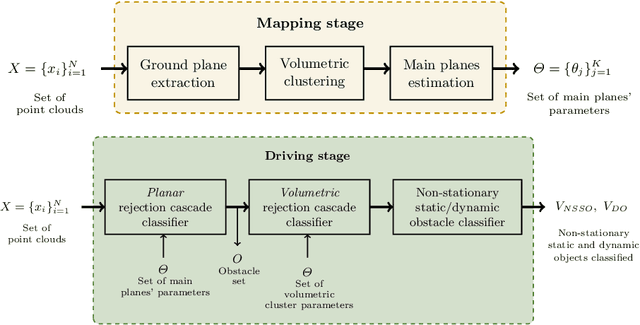
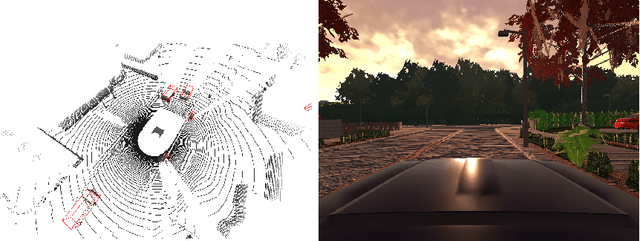

Lidar has become an essential sensor for autonomous driving as it provides reliable depth estimation. Lidar is also the primary sensor used in building 3D maps which can be used even in the case of low-cost systems which do not use Lidar. Computation on Lidar point clouds is intensive as it requires processing of millions of points per second. Additionally there are many subsequent tasks such as clustering, detection, tracking and classification which makes real-time execution challenging. In this paper, we discuss real-time dynamic object detection algorithms which leverages previously mapped Lidar point clouds to reduce processing. The prior 3D maps provide a static background model and we formulate dynamic object detection as a background subtraction problem. Computation and modeling challenges in the mapping and online execution pipeline are described. We propose a rejection cascade architecture to subtract road regions and other 3D regions separately. We implemented an initial version of our proposed algorithm and evaluated the accuracy on CARLA simulator.