 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Study of Low-Latency Video Streaming in an ORAN Setup with Generative AI
Dec 17, 2024Video streaming services depend on the underlying communication infrastructure and available network resources to offer ultra-low latency, high-quality content delivery. Open Radio Access Network (ORAN) provides a dynamic, programmable, and flexible RAN architecture that can be configured to support the requirements of time-critical applications. This work considers a setup in which the constrained network resources are supplemented by \gls{GAI} and \gls{MEC} {techniques} in order to reach a satisfactory video quality. Specifically, we implement a novel semantic control channel that enables \gls{MEC} to support low-latency applications by tight coupling among the ORAN xApp, \gls{MEC}, and the control channel. The proposed concepts are experimentally verified with an actual ORAN setup that supports video streaming. The performance evaluation includes the \gls{PSNR} metric and end-to-end latency. Our findings reveal that latency adjustments can yield gains in image \gls{PSNR}, underscoring the trade-off potential for optimized video quality in resource-limited environments.
Scalable Data Transmission Framework for Earth Observation Satellites with Channel Adaptation
Dec 16, 2024The immense volume of data generated by Earth observation (EO) satellites presents significant challenges in transmitting it to Earth over rate-limited satellite-to-ground communication links. This paper presents an efficient downlink framework for multi-spectral satellite images, leveraging adaptive transmission techniques based on pixel importance and link capacity. By integrating semantic communication principles, the framework prioritizes critical information, such as changed multi-spectral pixels, to optimize data transmission. The process involves preprocessing, assessing pixel importance to encode only significant changes, and dynamically adjusting transmissions to match channel conditions. Experimental results on the real dataset and simulated link demonstrate that the proposed approach ensures high-quality data delivery while significantly reducing number of transmitted data, making it highly suitable for satellite-based EO applications.
Digital Twin for Autonomous Guided Vehicles based on Integrated Sensing and Communications
Sep 12, 2024



This paper presents a Digital Twin (DT) framework for the remote control of an Autonomous Guided Vehicle (AGV) within a Network Control System (NCS). The AGV is monitored and controlled using Integrated Sensing and Communications (ISAC). In order to meet the real-time requirements, the DT computes the control signals and dynamically allocates resources for sensing and communication. A Reinforcement Learning (RL) algorithm is derived to learn and provide suitable actions while adjusting for the uncertainty in the AGV's position. We present closed-form expressions for the achievable communication rate and the Cramer-Rao bound (CRB) to determine the required number of Orthogonal Frequency-Division Multiplexing (OFDM) subcarriers, meeting the needs of both sensing and communication. The proposed algorithm is validated through a millimeter-Wave (mmWave) simulation, demonstrating significant improvements in both control precision and communication efficiency.
Timely Communication from Sensors for Wireless Networked Control in Cloud-Based Digital Twins
Aug 05, 2024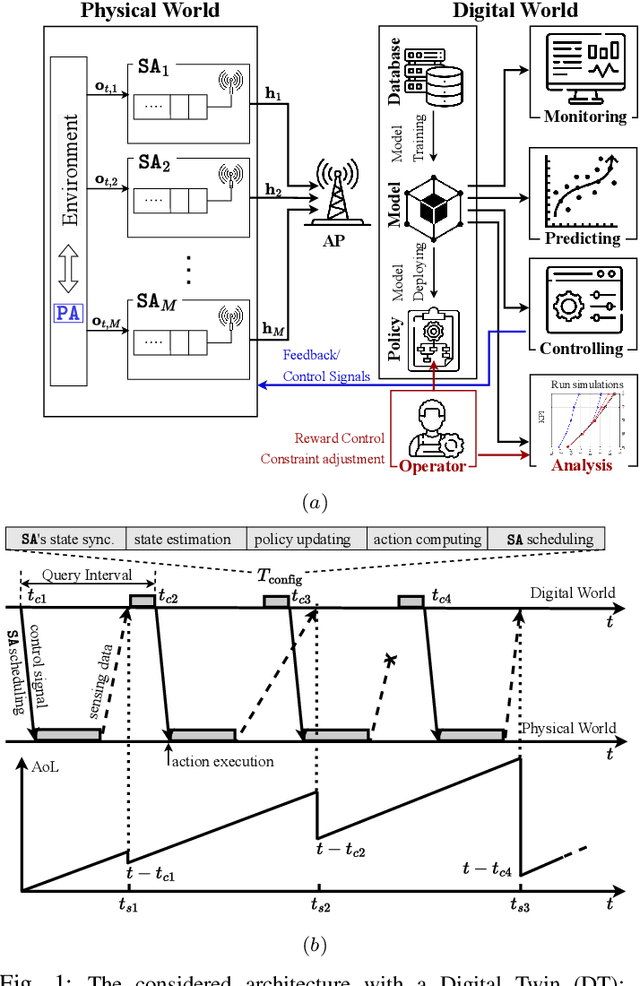
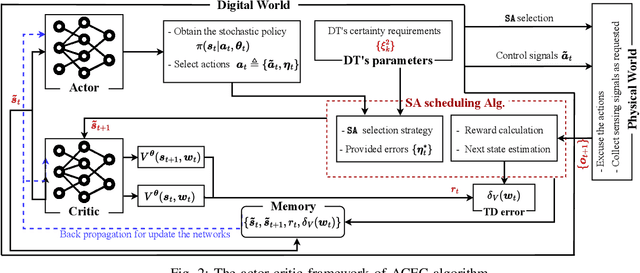
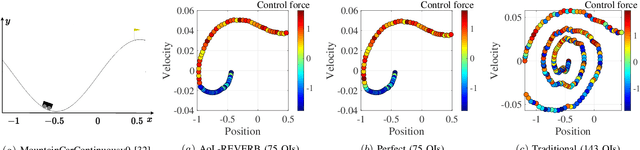
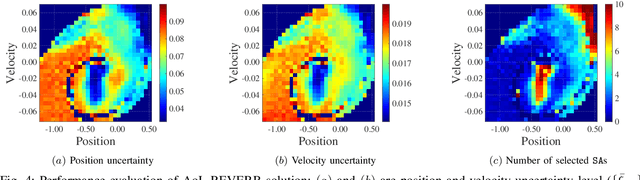
We consider a Wireless Networked Control System (WNCS) where sensors provide observations to build a DT model of the underlying system dynamics. The focus is on control, scheduling, and resource allocation for sensory observation to ensure timely delivery to the DT model deployed in the cloud. \phuc{Timely and relevant information, as characterized by optimized data acquisition policy and low latency, are instrumental in ensuring that the DT model can accurately estimate and predict system states. However, optimizing closed-loop control with DT and acquiring data for efficient state estimation and control computing pose a non-trivial problem given the limited network resources, partial state vector information, and measurement errors encountered at distributed sensing agents.} To address this, we propose the \emph{Age-of-Loop REinforcement learning and Variational Extended Kalman filter with Robust Belief (AoL-REVERB)}, which leverages an uncertainty-control reinforcement learning solution combined with an algorithm based on Value of Information (VoI) for performing optimal control and selecting the most informative sensors to satisfy the prediction accuracy of DT. Numerical results demonstrate that the DT platform can offer satisfactory performance while halving the communication overhead.
Digital Twin of Industrial Networked Control System based on Value of Information
Apr 23, 2024



The paper examines a scenario wherein sensors are deployed within an Industrial Networked Control System, aiming to construct a digital twin (DT) model for a remotely operated Autonomous Guided Vehicle (AGV). The DT model, situated on a cloud platform, estimates and predicts the system's state, subsequently formulating the optimal scheduling strategy for execution in the physical world. However, acquiring data crucial for efficient state estimation and control computation poses a significant challenge, primarily due to constraints such as limited network resources, partial observation, and the necessity to maintain a certain confidence level for DT estimation. We propose an algorithm based on Value of Information (VoI), seamlessly integrated with the Extended Kalman Filter to deliver a polynomial-time solution, selecting the most informative subset of sensing agents for data. Additionally, we put forth an alternative solution leveraging a Graph Neural Network to precisely ascertain the AGV's position with a remarkable accuracy of up to 5 cm. Our experimental validation in an industrial robotic laboratory environment yields promising results, underscoring the potential of high-accuracy DT models in practice.
Value-Based Reinforcement Learning for Digital Twins in Cloud Computing
Nov 27, 2023The setup considered in the paper consists of sensors in a Networked Control System that are used to build a digital twin (DT) model of the system dynamics. The focus is on control, scheduling, and resource allocation for sensory observation to ensure timely delivery to the DT model deployed in the cloud. Low latency and communication timeliness are instrumental in ensuring that the DT model can accurately estimate and predict system states. However, acquiring data for efficient state estimation and control computing poses a non-trivial problem given the limited network resources, partial state vector information, and measurement errors encountered at distributed sensors. We propose the REinforcement learning and Variational Extended Kalman filter with Robust Belief (REVERB), which leverages a reinforcement learning solution combined with a Value of Information-based algorithm for performing optimal control and selecting the most informative sensors to satisfy the prediction accuracy of DT. Numerical results demonstrate that the DT platform can offer satisfactory performance while reducing the communication overhead up to five times.
On-board Change Detection for Resource-efficient Earth Observation with LEO Satellites
May 17, 2023



The amount of data generated by Earth observation satellites can be enormous, which poses a great challenge to the satellite-to-ground connections with limited rate. This paper considers problem of efficient downlink communication of multi-spectral satellite images for Earth observation using change detection. The proposed method for image processing consists of the joint design of cloud removal and change encoding, which can be seen as an instance of semantic communication, as it encodes important information, such as changed multi-spectral pixels (MPs), while aiming to minimize energy consumption. It comprises a three-stage end-to-end scoring mechanism that determines the importance of each MP before deciding its transmission. Specifically, the sensing image is (1) standardized, (2) passed through a high-performance cloud filtering via the Cloud-Net model, and (3) passed to the proposed scoring algorithm that uses Change-Net to identify MPs that have a high likelihood of being changed, compress them and forward the result to the ground station. The experimental results indicate that the proposed framework is effective in optimizing energy usage while preserving high-quality data transmission in satellite-based Earth observation applications.
Game Networking and its Evolution towards Supporting Metaverse through the 6G Wireless Systems
Feb 03, 2023



The sixth generation (6G) of wireless technology is seen as one of the enablers of real-time fusion of the physical and digital realms, as in the Metaverse, extended reality (XR), or Digital Twin (DT). This would allow people to interact, work, and entertain themselves in immersive online 3D virtual environments. From the viewpoint of communication and networking, this will represent an evolution of the game networking technology, designed to interconnect massive users in real-time online gaming environments. This article presents the basic principles of game networking and discusses their evolution towards meeting the requirements of the Metaverse and similar applications. Several open research challenges are provided, along with possible solutions.
Scheduling Policy for Value-of-Information in Trajectory Estimation for Digital Twins
Jan 26, 2023This paper presents an approach to schedule observations from different sensors in an environment to ensure their timely delivery and build a digital twin (DT) model of the system dynamics. At the cloud platform, DT models estimate and predict the system's state, then compute the optimal scheduling policy and resource allocation strategy to be executed in the physical world. However, given limited network resources, partial state vector information, and measurement errors at the distributed sensing agents, the acquisition of data (i.e., observations) for efficient state estimation of system dynamics is a non-trivial problem. We propose a Value of Information (VoI)-based algorithm that provides a polynomial-time solution for selecting the most informative subset of sensing agents to improve confidence in the state estimation of DT models. Numerical results confirm that the proposed method outperforms other benchmarks, reducing the communication overhead by half while maintaining the required estimation accuracy.
Robust Congestion Control for Demand-Based Optimization in Precoded Multi-Beam High Throughput Satellite Communications
Sep 06, 2021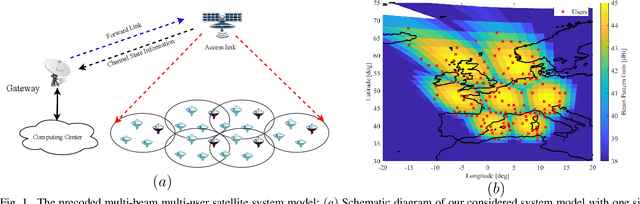
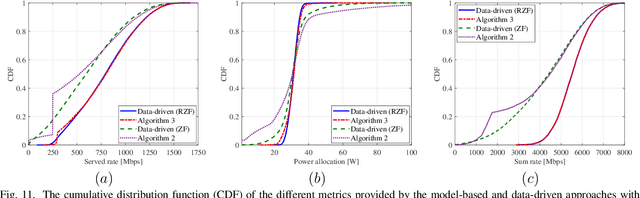
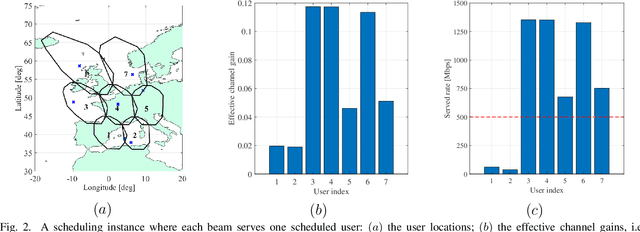
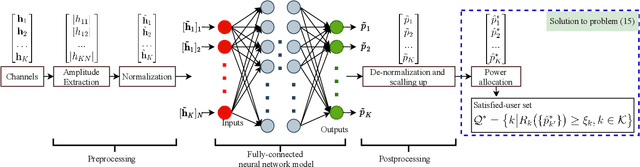
High-throughput satellite communications systems are growing in strategic importance thanks to their role in delivering broadband services to mobile platforms and residences and/or businesses in rural and remote regions globally. Although precoding has emerged as a prominent technique to meet ever-increasing user demands, there is a lack of studies dealing with congestion control. This paper enhances the performance of multi-beam high throughput geostationary (GEO) satellite systems under congestion, where the users' quality of service (QoS) demands cannot be fully satisfied with limited resources. In particular, we propose congestion control strategies, relying on simple power control schemes. We formulate a multi-objective optimization framework balancing the system sum-rate and the number of users satisfying their QoS requirements. Next, we propose two novel approaches that effectively handle the proposed multi-objective optimization problem. The former is a model-based approach that relies on the weighted sum method to enrich the number of satisfied users by solving a series of the sum-rate optimization problems in an iterative manner. Meanwhile, the latter is a data-driven approach that offers a low-cost solution by utilizing supervised learning and exploiting the optimization structures as continuous mappings. The proposed general framework is evaluated for different linear precoding techniques, for which the low computational complexity algorithms are designed. Numerical results manifest that our proposed framework effectively handles the congestion issue and brings superior improvements of rate satisfaction to many users than previous works. Furthermore, the proposed algorithms show low run-time, which make them realistic for practical systems.