 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin for Autonomous Guided Vehicles based on Integrated Sensing and Communications
Sep 12, 2024



This paper presents a Digital Twin (DT) framework for the remote control of an Autonomous Guided Vehicle (AGV) within a Network Control System (NCS). The AGV is monitored and controlled using Integrated Sensing and Communications (ISAC). In order to meet the real-time requirements, the DT computes the control signals and dynamically allocates resources for sensing and communication. A Reinforcement Learning (RL) algorithm is derived to learn and provide suitable actions while adjusting for the uncertainty in the AGV's position. We present closed-form expressions for the achievable communication rate and the Cramer-Rao bound (CRB) to determine the required number of Orthogonal Frequency-Division Multiplexing (OFDM) subcarriers, meeting the needs of both sensing and communication. The proposed algorithm is validated through a millimeter-Wave (mmWave) simulation, demonstrating significant improvements in both control precision and communication efficiency.
Contact-less Material Probing with Distributed Sensors: Joint Sensing and Communication Optimization
May 17, 2022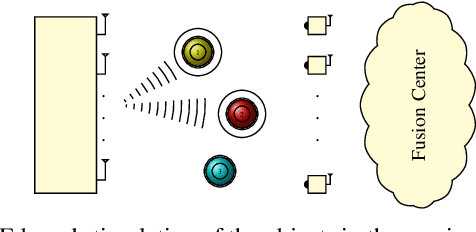
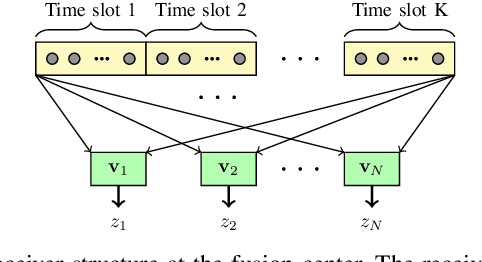
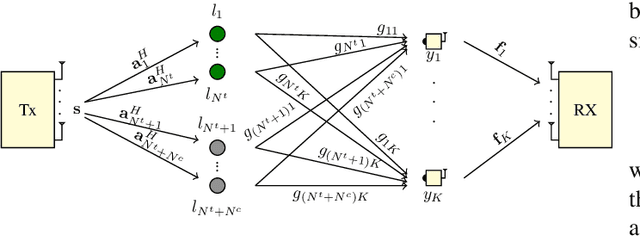
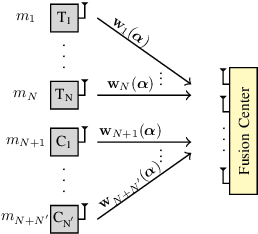
The utilization of RF signals to probe material properties of objects is of huge interest both in academia as well as industry. To this end, a setup is investigated, in which a transmitter equipped with a two-dimensional multi-antenna array dispatches a signal, which hits objects in the environment and the reflections from the objects are captured by distributed sensors. The received signal at those sensors are then amplified and forwarded to a multiple antenna fusion center, which performs space-time post-processing in order to optimize the information extraction. In this process, optimal design of power allocation per object alongside sensors amplifications is of crucial importance. Here, the power allocation and sensors amplifications is jointly optimized, given maximum-ratio combining (MRC) at the fusion center. We formulate this challenge as a sum-power minimization under per-object SINR constraints, a sum-power constraint at the transmitter and individual power constraints at the sensors. Moreover, the advantage of deploying zero-forcing (ZF) and minimum mean-squared error (MMSE) at the fusion center is discussed. Asymptotic analysis is also provided for the case that large number of sensors are deployed in the sensing environment.