 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth-SIMS: Semi-Parametric Image and Depth Synthesis
Mar 07, 2022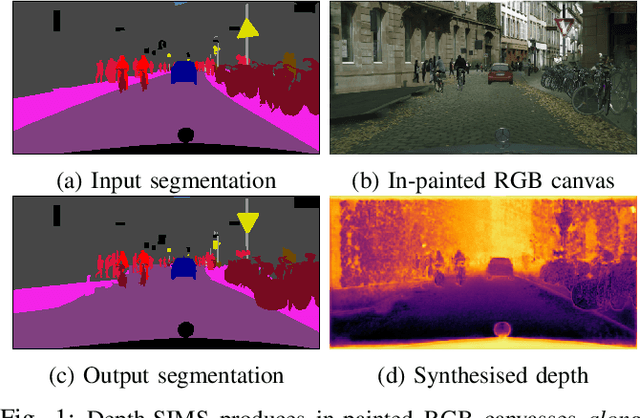



In this paper we present a compositing image synthesis method that generates RGB canvases with well aligned segmentation maps and sparse depth maps, coupled with an in-painting network that transforms the RGB canvases into high quality RGB images and the sparse depth maps into pixel-wise dense depth maps. We benchmark our method in terms of structural alignment and image quality, showing an increase in mIoU over SOTA by 3.7 percentage points and a highly competitive FID. Furthermore, we analyse the quality of the generated data as training data for semantic segmentation and depth completion, and show that our approach is more suited for this purpose than other methods.
Vision in adverse weather: Augmentation using CycleGANs with various object detectors for robust perception in autonomous racing
Jan 11, 2022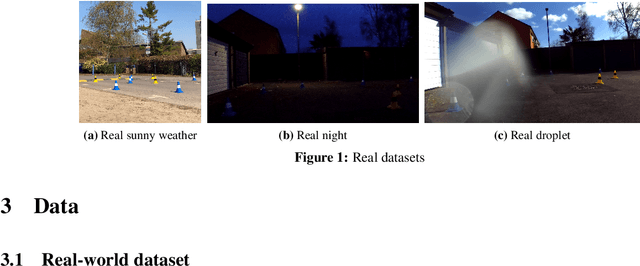
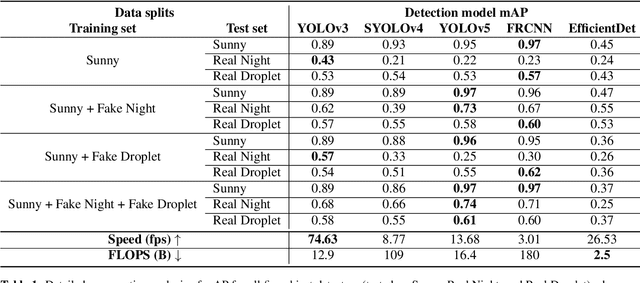
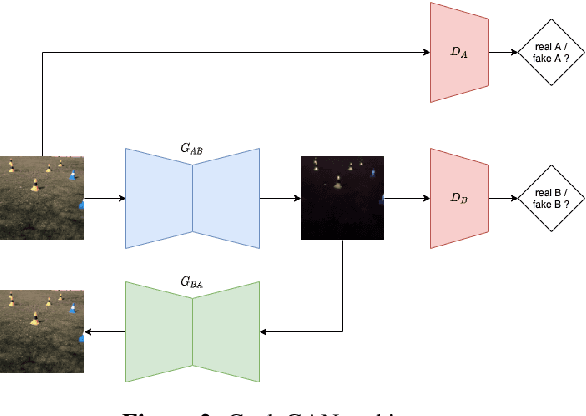
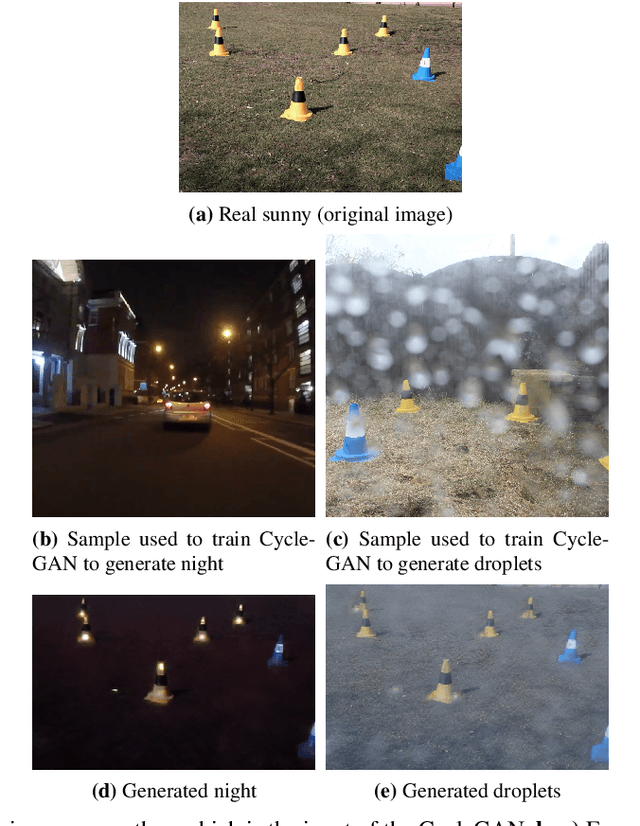
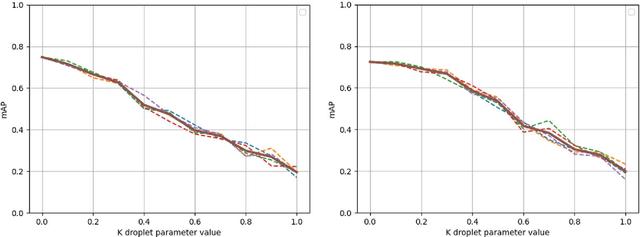
In an autonomous driving system, perception - identification of features and objects from the environment - is crucial. In autonomous racing, high speeds and small margins demand rapid and accurate detection systems. During the race, the weather can change abruptly, causing significant degradation in perception, resulting in ineffective manoeuvres. In order to improve detection in adverse weather, deep-learning-based models typically require extensive datasets captured in such conditions - the collection of which is a tedious, laborious, and costly process. However, recent developments in CycleGAN architectures allow the synthesis of highly realistic scenes in multiple weather conditions. To this end, we introduce an approach of using synthesised adverse condition datasets in autonomous racing (generated using CycleGAN) to improve the performance of four out of five state-of-the-art detectors by an average of 42.7 and 4.4 mAP percentage points in the presence of night-time conditions and droplets, respectively. Furthermore, we present a comparative analysis of five object detectors - identifying the optimal pairing of detector and training data for use during autonomous racing in challenging conditions.
Worsening Perception: Real-time Degradation of Autonomous Vehicle Perception Performance for Simulation of Adverse Weather Conditions
Mar 05, 2021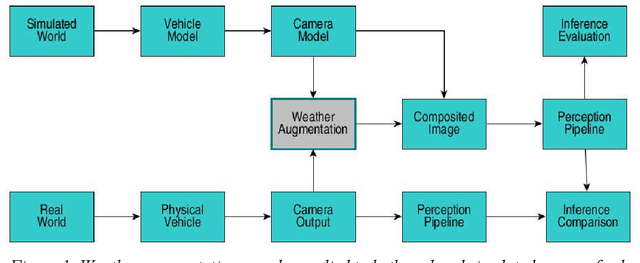
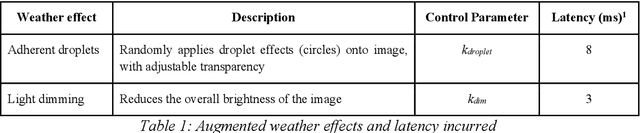
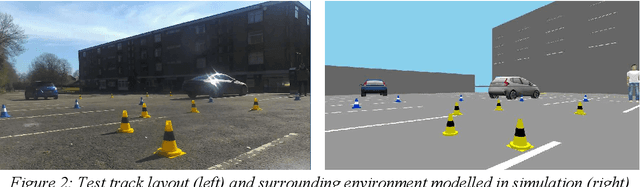
Autonomous vehicles rely heavily upon their perception subsystems to see the environment in which they operate. Unfortunately, the effect of varying weather conditions presents a significant challenge to object detection algorithms, and thus it is imperative to test the vehicle extensively in all conditions which it may experience. However, unpredictable weather can make real-world testing in adverse conditions an expensive and time consuming task requiring access to specialist facilities, and weatherproofing of sensitive electronics. Simulation provides an alternative to real world testing, with some studies developing increasingly visually realistic representations of the real world on powerful compute hardware. Given that subsequent subsystems in the autonomous vehicle pipeline are unaware of the visual realism of the simulation, when developing modules downstream of perception the appearance is of little consequence - rather it is how the perception system performs in the prevailing weather condition that is important. This study explores the potential of using a simple, lightweight image augmentation system in an autonomous racing vehicle - focusing not on visual accuracy, but rather the effect upon perception system performance. With minimal adjustment, the prototype system developed in this study can replicate the effects of both water droplets on the camera lens, and fading light conditions. The system introduces a latency of less than 8 ms using compute hardware that is well suited to being carried in the vehicle - rendering it ideally suited to real-time implementation that can be run during experiments in simulation, and augmented reality testing in the real world.