 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantifying the biomimicry gap in biohybrid systems
Aug 17, 2023Biohybrid systems in which robotic lures interact with animals have become compelling tools for probing and identifying the mechanisms underlying collective animal behavior. One key challenge lies in the transfer of social interaction models from simulations to reality, using robotics to validate the modeling hypotheses. This challenge arises in bridging what we term the "biomimicry gap", which is caused by imperfect robotic replicas, communication cues and physics constrains not incorporated in the simulations that may elicit unrealistic behavioral responses in animals. In this work, we used a biomimetic lure of a rummy-nose tetra fish (Hemigrammus rhodostomus) and a neural network (NN) model for generating biomimetic social interactions. Through experiments with a biohybrid pair comprising a fish and the robotic lure, a pair of real fish, and simulations of pairs of fish, we demonstrate that our biohybrid system generates high-fidelity social interactions mirroring those of genuine fish pairs. Our analyses highlight that: 1) the lure and NN maintain minimal deviation in real-world interactions compared to simulations and fish-only experiments, 2) our NN controls the robot efficiently in real-time, and 3) a comprehensive validation is crucial to bridge the biomimicry gap, ensuring realistic biohybrid systems.
Predicting long-term collective animal behavior with deep learning
Feb 14, 2023



Deciphering the social interactions that govern collective behavior in animal societies has greatly benefited from advancements in modern computing. Computational models diverge into two kinds of approaches: analytical models and machine learning models. This work introduces a deep learning model for social interactions in the fish species Hemigrammus rhodostomus, and compares its results to experiments and to the results of a state-of-the-art analytical model. To that end, we propose a systematic methodology to assess the faithfulness of a model, based on the introduction of a set of stringent observables. We demonstrate that machine learning models of social interactions can directly compete against their analytical counterparts. Moreover, this work demonstrates the need for consistent validation across different timescales and highlights which design aspects critically enables our deep learning approach to capture both short- and long-term dynamics. We also show that this approach is scalable to other fish species.
Exploring a Handwriting Programming Language for Educational Robots
May 11, 2021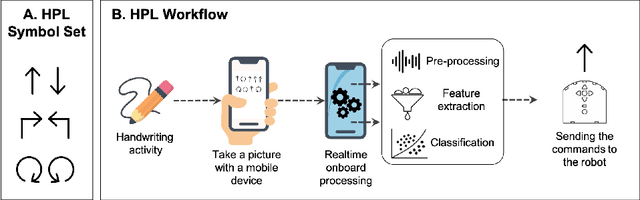
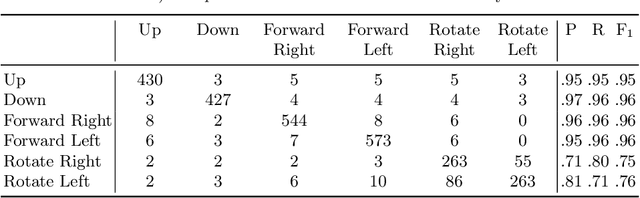
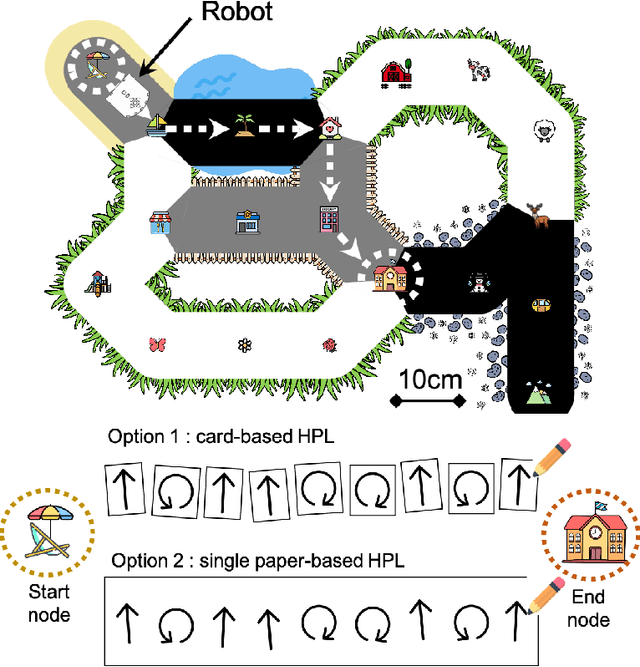
Recently, introducing computer science and educational robots in compulsory education has received increasing attention. However, the use of screens in classrooms is often met with resistance, especially in primary school. To address this issue, this study presents the development of a handwriting-based programming language for educational robots. Aiming to align better with existing classroom practices, it allows students to program a robot by drawing symbols with ordinary pens and paper. Regular smartphones are leveraged to process the hand-drawn instructions using computer vision and machine learning algorithms, and send the commands to the robot for execution. To align with the local computer science curriculum, an appropriate playground and scaffolded learning tasks were designed. The system was evaluated in a preliminary test with eight teachers, developers and educational researchers. While the participants pointed out that some technical aspects could be improved, they also acknowledged the potential of the approach to make computer science education in primary school more accessible.
Safety-Aware Robot Damage Recovery Using Constrained Bayesian Optimization and Simulated Priors
Dec 02, 2016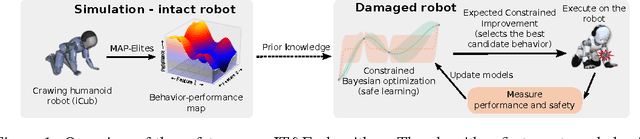
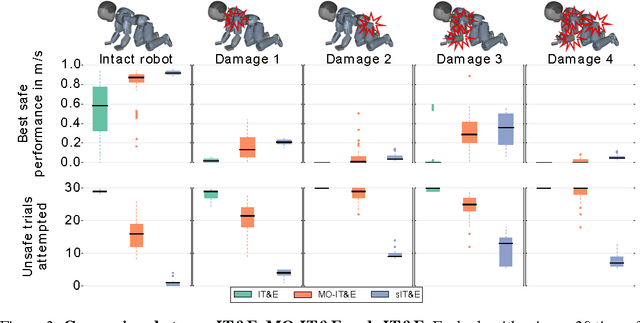
The recently introduced Intelligent Trial-and-Error (IT&E) algorithm showed that robots can adapt to damage in a matter of a few trials. The success of this algorithm relies on two components: prior knowledge acquired through simulation with an intact robot, and Bayesian optimization (BO) that operates on-line, on the damaged robot. While IT&E leads to fast damage recovery, it does not incorporate any safety constraints that prevent the robot from attempting harmful behaviors. In this work, we address this limitation by replacing the BO component with a constrained BO procedure. We evaluate our approach on a simulated damaged humanoid robot that needs to crawl as fast as possible, while performing as few unsafe trials as possible. We compare our new "safety-aware IT&E" algorithm to IT&E and a multi-objective version of IT&E in which the safety constraints are dealt as separate objectives. Our results show that our algorithm outperforms the other approaches, both in crawling speed within the safe regions and number of unsafe trials.