 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralisable Methods for Early Prediction in Interactive Simulations for Education
Jul 04, 2022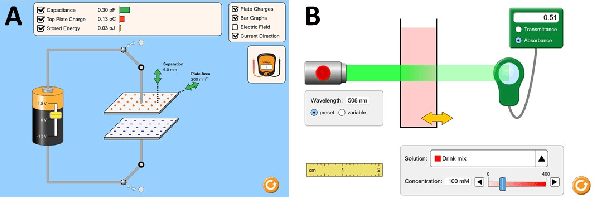

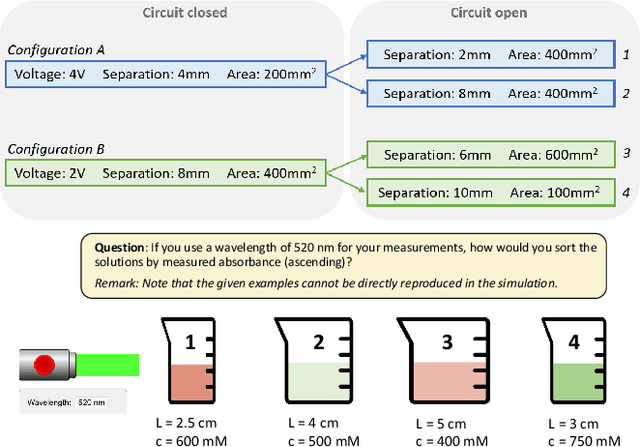
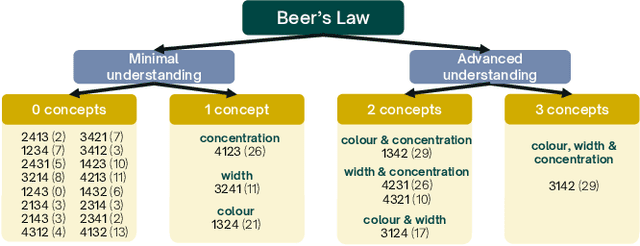
Interactive simulations allow students to discover the underlying principles of a scientific phenomenon through their own exploration. Unfortunately, students often struggle to learn effectively in these environments. Classifying students' interaction data in the simulations based on their expected performance has the potential to enable adaptive guidance and consequently improve students' learning. Previous research in this field has mainly focused on a-posteriori analyses or investigations limited to one specific predictive model and simulation. In this paper, we investigate the quality and generalisability of models for an early prediction of conceptual understanding based on clickstream data of students across interactive simulations. We first measure the students' conceptual understanding through their in-task performance. Then, we suggest a novel type of features that, starting from clickstream data, encodes both the state of the simulation and the action performed by the student. We finally propose to feed these features into GRU-based models, with and without attention, for prediction. Experiments on two different simulations and with two different populations show that our proposed models outperform shallow learning baselines and better generalise to different learning environments and populations. The inclusion of attention into the model increases interpretability in terms of effective inquiry. The source code is available on Github (https://github.com/epfl-ml4ed/beerslaw-lab.git).
Educational Robotics in Online Distance Learning: An Experience from Primary School
May 20, 2021

Temporary school closures caused by the Covid-19 pandemic have posed new challenges for many teachers and students worldwide. Especially the abrupt shift to online distance learning posed many obstacles to be overcome and it particularly complicated the implementation of Educational Robotics activities. Such activities usually comprise a variety of different learning artifacts, which were not accessible to many students during the period of school closure. Moreover, online distance learning considerably limits the possibilities for students to interact with their peers and teachers. In an attempt to address these issues, this work presents the development of an Educational Robotics activity particularly conceived for online distance learning in primary school. The devised activities are based on pen and paper approaches that are complemented by commonly used social media to facilitate communication and collaboration. They were proposed to 13 students, as a way to continue ER activities in online distance learning over the time period of four weeks.
Teachers' perspective on fostering computational thinking through educational robotics
May 11, 2021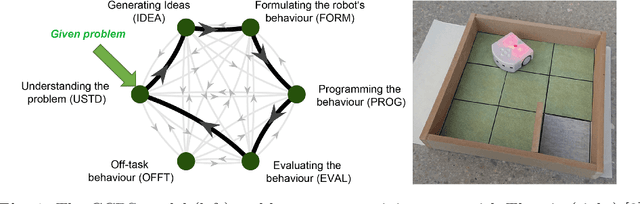
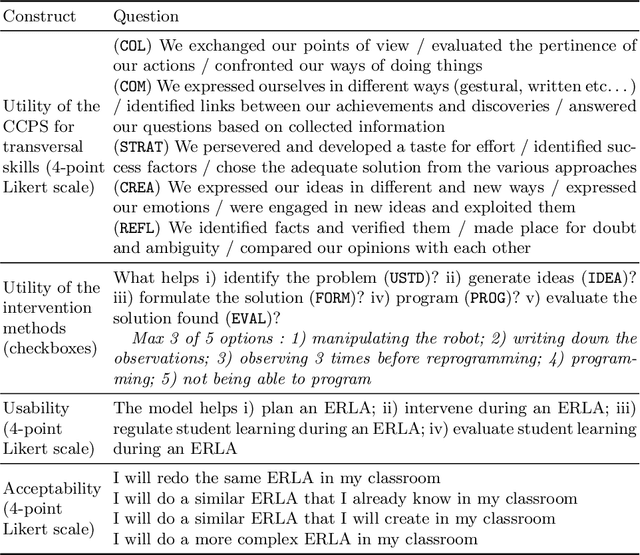
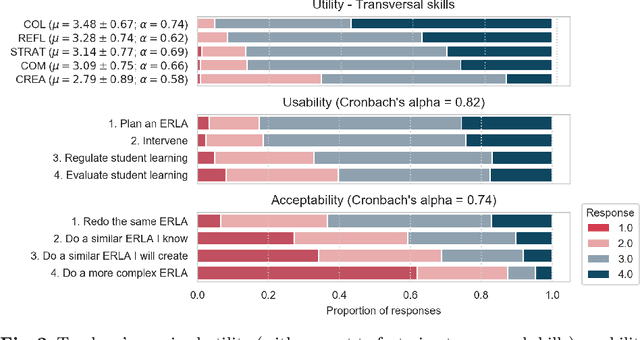

With the introduction of educational robotics (ER) and computational thinking (CT) in classrooms, there is a rising need for operational models that help ensure that CT skills are adequately developed. One such model is the Creative Computational Problem Solving Model (CCPS) which can be employed to improve the design of ER learning activities. Following the first validation with students, the objective of the present study is to validate the model with teachers, specifically considering how they may employ the model in their own practices. The Utility, Usability and Acceptability framework was leveraged for the evaluation through a survey analysis with 334 teachers. Teachers found the CCPS model useful to foster transversal skills but could not recognise the impact of specific intervention methods on CT-related cognitive processes. Similarly, teachers perceived the model to be usable for activity design and intervention, although felt unsure about how to use it to assess student learning and adapt their teaching accordingly. Finally, the teachers accepted the model, as shown by their intent to replicate the activity in their classrooms, but were less willing to modify it or create their own activities, suggesting that they need time to appropriate the model and underlying tenets.
Exploring a Handwriting Programming Language for Educational Robots
May 11, 2021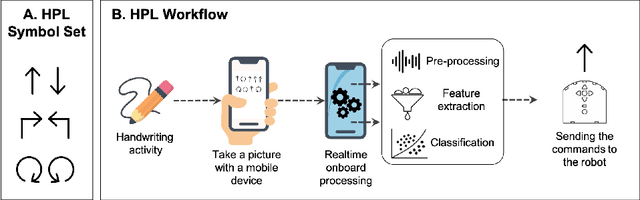
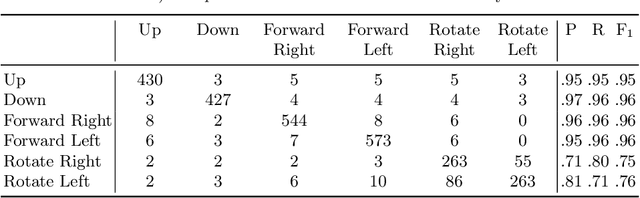
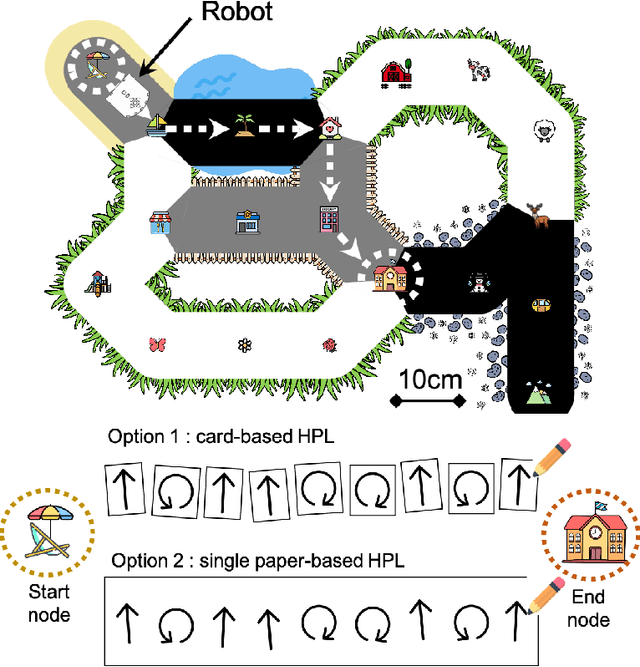
Recently, introducing computer science and educational robots in compulsory education has received increasing attention. However, the use of screens in classrooms is often met with resistance, especially in primary school. To address this issue, this study presents the development of a handwriting-based programming language for educational robots. Aiming to align better with existing classroom practices, it allows students to program a robot by drawing symbols with ordinary pens and paper. Regular smartphones are leveraged to process the hand-drawn instructions using computer vision and machine learning algorithms, and send the commands to the robot for execution. To align with the local computer science curriculum, an appropriate playground and scaffolded learning tasks were designed. The system was evaluated in a preliminary test with eight teachers, developers and educational researchers. While the participants pointed out that some technical aspects could be improved, they also acknowledged the potential of the approach to make computer science education in primary school more accessible.