 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSthymuli: a Static Educational Robot. Leveraging the Thymio II Platform
Jan 13, 2025


The use of robots in education represents a challenge for teachers and a fixed vision of what robots can do for students. This paper presents the development of Sthymuli, a static educational robot designed to explore new classroom interactions between robots, students and teachers. We propose the use of the Thymio II educational platform as a base, ensuring a robust benchmark for a fair comparison of the commonly available wheeled robots and our exploratory approach with Sthymuli. This paper outlines the constraints and requirements for developing such a robot, the current state of development and future work.
Quantifying the biomimicry gap in biohybrid systems
Aug 17, 2023Biohybrid systems in which robotic lures interact with animals have become compelling tools for probing and identifying the mechanisms underlying collective animal behavior. One key challenge lies in the transfer of social interaction models from simulations to reality, using robotics to validate the modeling hypotheses. This challenge arises in bridging what we term the "biomimicry gap", which is caused by imperfect robotic replicas, communication cues and physics constrains not incorporated in the simulations that may elicit unrealistic behavioral responses in animals. In this work, we used a biomimetic lure of a rummy-nose tetra fish (Hemigrammus rhodostomus) and a neural network (NN) model for generating biomimetic social interactions. Through experiments with a biohybrid pair comprising a fish and the robotic lure, a pair of real fish, and simulations of pairs of fish, we demonstrate that our biohybrid system generates high-fidelity social interactions mirroring those of genuine fish pairs. Our analyses highlight that: 1) the lure and NN maintain minimal deviation in real-world interactions compared to simulations and fish-only experiments, 2) our NN controls the robot efficiently in real-time, and 3) a comprehensive validation is crucial to bridge the biomimicry gap, ensuring realistic biohybrid systems.
Predicting long-term collective animal behavior with deep learning
Feb 14, 2023



Deciphering the social interactions that govern collective behavior in animal societies has greatly benefited from advancements in modern computing. Computational models diverge into two kinds of approaches: analytical models and machine learning models. This work introduces a deep learning model for social interactions in the fish species Hemigrammus rhodostomus, and compares its results to experiments and to the results of a state-of-the-art analytical model. To that end, we propose a systematic methodology to assess the faithfulness of a model, based on the introduction of a set of stringent observables. We demonstrate that machine learning models of social interactions can directly compete against their analytical counterparts. Moreover, this work demonstrates the need for consistent validation across different timescales and highlights which design aspects critically enables our deep learning approach to capture both short- and long-term dynamics. We also show that this approach is scalable to other fish species.
Investigating the role of educational robotics in formal mathematics education: the case of geometry for 15-year-old students
Jun 21, 2021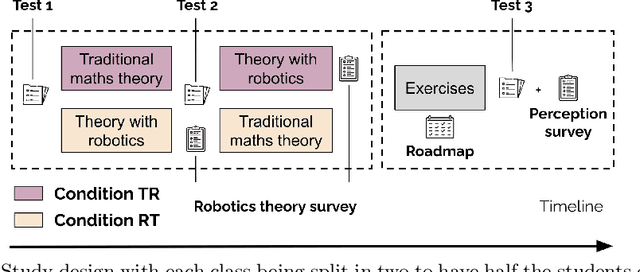

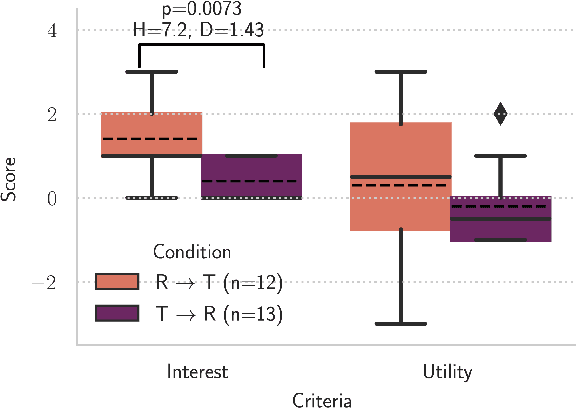
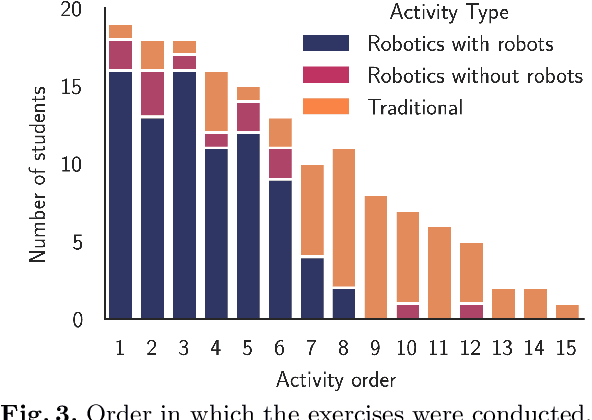
Research has shown that Educational Robotics (ER) enhances student performance, interest, engagement and collaboration. However, until now, the adoption of robotics in formal education has remained relatively scarce. Among other causes, this is due to the difficulty of determining the alignment of educational robotic learning activities with the learning outcomes envisioned by the curriculum, as well as their integration with traditional, non-robotics learning activities that are well established in teachers' practices. This work investigates the integration of ER into formal mathematics education, through a quasi-experimental study employing the Thymio robot and Scratch programming to teach geometry to two classes of 15-year-old students, for a total of 26 participants. Three research questions were addressed: (1) Should an ER-based theoretical lecture precede, succeed or replace a traditional theoretical lecture? (2) What is the students' perception of and engagement in the ER-based lecture and exercises? (3) Do the findings differ according to students' prior appreciation of mathematics? The results suggest that ER activities are as valid as traditional ones in helping students grasp the relevant theoretical concepts. Robotics activities seem particularly beneficial during exercise sessions: students freely chose to do exercises that included the robot, rated them as significantly more interesting and useful than their traditional counterparts, and expressed their interest in introducing ER in other mathematics lectures. Finally, results were generally consistent between the students that like and did not like mathematics, suggesting the use of robotics as a means to broaden the number of students engaged in the discipline.
Teachers' perspective on fostering computational thinking through educational robotics
May 11, 2021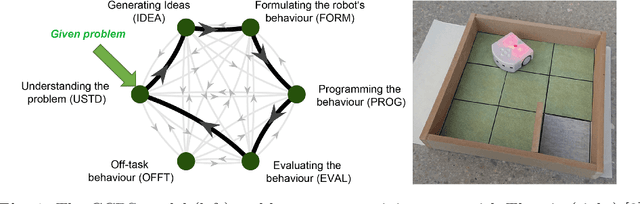
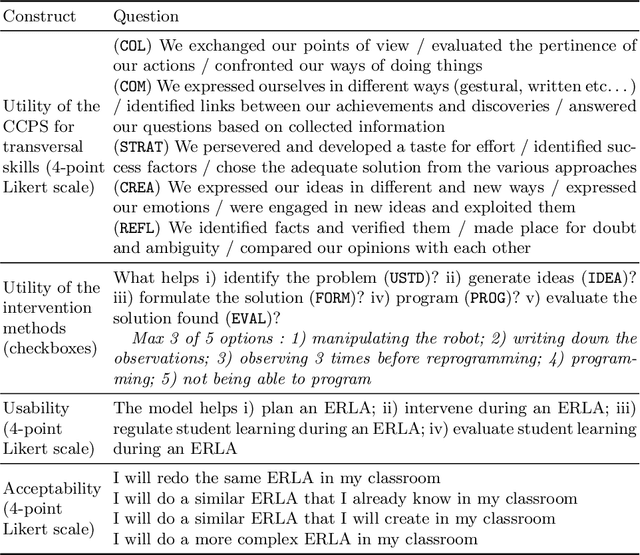
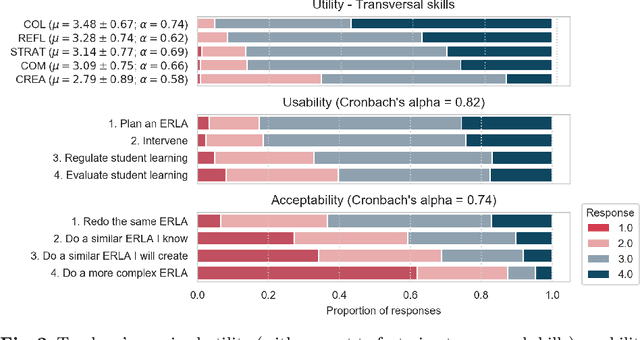

With the introduction of educational robotics (ER) and computational thinking (CT) in classrooms, there is a rising need for operational models that help ensure that CT skills are adequately developed. One such model is the Creative Computational Problem Solving Model (CCPS) which can be employed to improve the design of ER learning activities. Following the first validation with students, the objective of the present study is to validate the model with teachers, specifically considering how they may employ the model in their own practices. The Utility, Usability and Acceptability framework was leveraged for the evaluation through a survey analysis with 334 teachers. Teachers found the CCPS model useful to foster transversal skills but could not recognise the impact of specific intervention methods on CT-related cognitive processes. Similarly, teachers perceived the model to be usable for activity design and intervention, although felt unsure about how to use it to assess student learning and adapt their teaching accordingly. Finally, the teachers accepted the model, as shown by their intent to replicate the activity in their classrooms, but were less willing to modify it or create their own activities, suggesting that they need time to appropriate the model and underlying tenets.
Exploring a Handwriting Programming Language for Educational Robots
May 11, 2021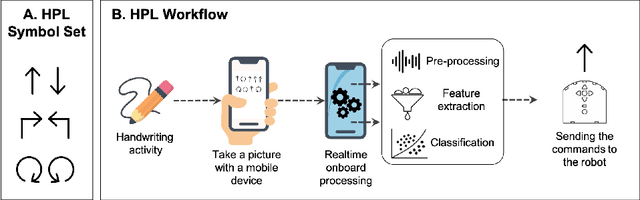
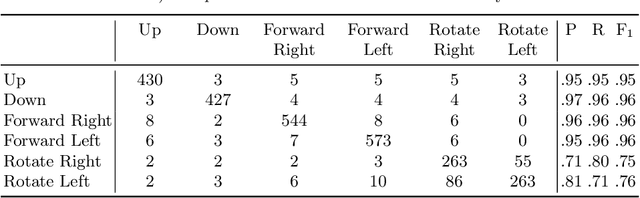
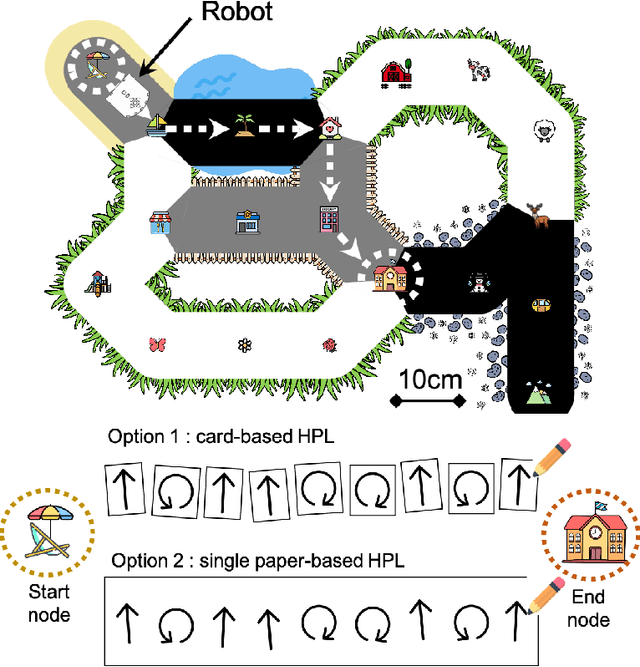
Recently, introducing computer science and educational robots in compulsory education has received increasing attention. However, the use of screens in classrooms is often met with resistance, especially in primary school. To address this issue, this study presents the development of a handwriting-based programming language for educational robots. Aiming to align better with existing classroom practices, it allows students to program a robot by drawing symbols with ordinary pens and paper. Regular smartphones are leveraged to process the hand-drawn instructions using computer vision and machine learning algorithms, and send the commands to the robot for execution. To align with the local computer science curriculum, an appropriate playground and scaffolded learning tasks were designed. The system was evaluated in a preliminary test with eight teachers, developers and educational researchers. While the participants pointed out that some technical aspects could be improved, they also acknowledged the potential of the approach to make computer science education in primary school more accessible.
How to Blend a Robot within a Group of Zebrafish: Achieving Social Acceptance through Real-time Calibration of a Multi-level Behavioural Model
May 29, 2018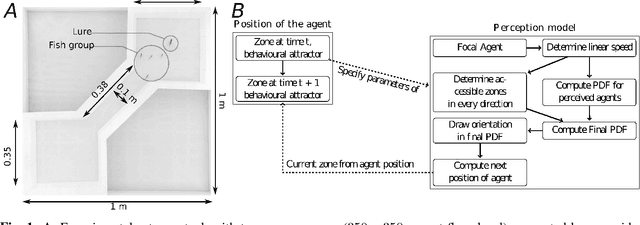


We have previously shown how to socially integrate a fish robot into a group of zebrafish thanks to biomimetic behavioural models. The models have to be calibrated on experimental data to present correct behavioural features. This calibration is essential to enhance the social integration of the robot into the group. When calibrated, the behavioural model of fish behaviour is implemented to drive a robot with closed-loop control of social interactions into a group of zebrafish. This approach can be useful to form mixed-groups, and study animal individual and collective behaviour by using biomimetic autonomous robots capable of responding to the animals in long-standing experiments. Here, we show a methodology for continuous real-time calibration and refinement of multi-level behavioural model. The real-time calibration, by an evolutionary algorithm, is based on simulation of the model to correspond to the observed fish behaviour in real-time. The calibrated model is updated on the robot and tested during the experiments. This method allows to cope with changes of dynamics in fish behaviour. Moreover, each fish presents individual behavioural differences. Thus, each trial is done with naive fish groups that display behavioural variability. This real-time calibration methodology can optimise the robot behaviours during the experiments. Our implementation of this methodology runs on three different computers that perform individual tracking, data-analysis, multi-objective evolutionary algorithms, simulation of the fish robot and adaptation of the robot behavioural models, all in real-time.