 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePobogot -- An Open-Hardware Open-Source Low Cost Robot for Swarm Robotics
Apr 11, 2025This paper describes the Pogobot, an open-source and open-hardware platform specifically designed for research involving swarm robotics. Pogobot features vibration-based locomotion, infrared communication, and an array of sensors in a cost-effective package (approx. 250~euros/unit). The platform's modular design, comprehensive API, and extensible architecture facilitate the implementation of swarm intelligence algorithms and distributed online reinforcement learning algorithms. Pogobots offer an accessible alternative to existing platforms while providing advanced capabilities including directional communication between units. More than 200 Pogobots are already being used on a daily basis at Sorbonne Universit\'e and PSL to study self-organizing systems, programmable active matter, discrete reaction-diffusion-advection systems as well as models of social learning and evolution.
Signaling and Social Learning in Swarms of Robots
Nov 19, 2024This paper investigates the role of communication in improving coordination within robot swarms, focusing on a paradigm where learning and execution occur simultaneously in a decentralized manner. We highlight the role communication can play in addressing the credit assignment problem (individual contribution to the overall performance), and how it can be influenced by it. We propose a taxonomy of existing and future works on communication, focusing on information selection and physical abstraction as principal axes for classification: from low-level lossless compression with raw signal extraction and processing to high-level lossy compression with structured communication models. The paper reviews current research from evolutionary robotics, multi-agent (deep) reinforcement learning, language models, and biophysics models to outline the challenges and opportunities of communication in a collective of robots that continuously learn from one another through local message exchanges, illustrating a form of social learning.
Hearing the shape of an arena with spectral swarm robotics
Mar 25, 2024Swarm robotics promises adaptability to unknown situations and robustness against failures. However, it still struggles with global tasks that require understanding the broader context in which the robots operate, such as identifying the shape of the arena in which the robots are embedded. Biological swarms, such as shoals of fish, flocks of birds, and colonies of insects, routinely solve global geometrical problems through the diffusion of local cues. This paradigm can be explicitly described by mathematical models that could be directly computed and exploited by a robotic swarm. Diffusion over a domain is mathematically encapsulated by the Laplacian, a linear operator that measures the local curvature of a function. Crucially the geometry of a domain can generally be reconstructed from the eigenspectrum of its Laplacian. Here we introduce spectral swarm robotics where robots diffuse information to their neighbors to emulate the Laplacian operator - enabling them to "hear" the spectrum of their arena. We reveal a universal scaling that links the optimal number of robots (a global parameter) with their optimal radius of interaction (a local parameter). We validate experimentally spectral swarm robotics under challenging conditions with the one-shot classification of arena shapes using a sparse swarm of Kilobots. Spectral methods can assist with challenging tasks where robots need to build an emergent consensus on their environment, such as adaptation to unknown terrains, division of labor, or quorum sensing. Spectral methods may extend beyond robotics to analyze and coordinate swarms of agents of various natures, such as traffic or crowds, and to better understand the long-range dynamics of natural systems emerging from short-range interactions.
Ensemble Feature Extraction for Multi-Container Quality-Diversity Algorithms
May 03, 2021



Quality-Diversity algorithms search for large collections of diverse and high-performing solutions, rather than just for a single solution like typical optimisation methods. They are specially adapted for multi-modal problems that can be solved in many different ways, such as complex reinforcement learning or robotics tasks. However, these approaches are highly dependent on the choice of feature descriptors (FDs) quantifying the similarity in behaviour of the solutions. While FDs usually needs to be hand-designed, recent studies have proposed ways to define them automatically by using feature extraction techniques, such as PCA or Auto-Encoders, to learn a representation of the problem from previously explored solutions. Here, we extend these approaches to more complex problems which cannot be efficiently explored by relying only on a single representation but require instead a set of diverse and complementary representations. We describe MC-AURORA, a Quality-Diversity approach that optimises simultaneously several collections of solutions, each with a different set of FDs, which are, in turn, defined automatically by an ensemble of modular auto-encoders. We show that this approach produces solutions that are more diverse than those produced by single-representation approaches.
Exploring Self-Assembling Behaviors in a Swarm of Bio-micro-robots using Surrogate-Assisted MAP-Elites
Oct 01, 2019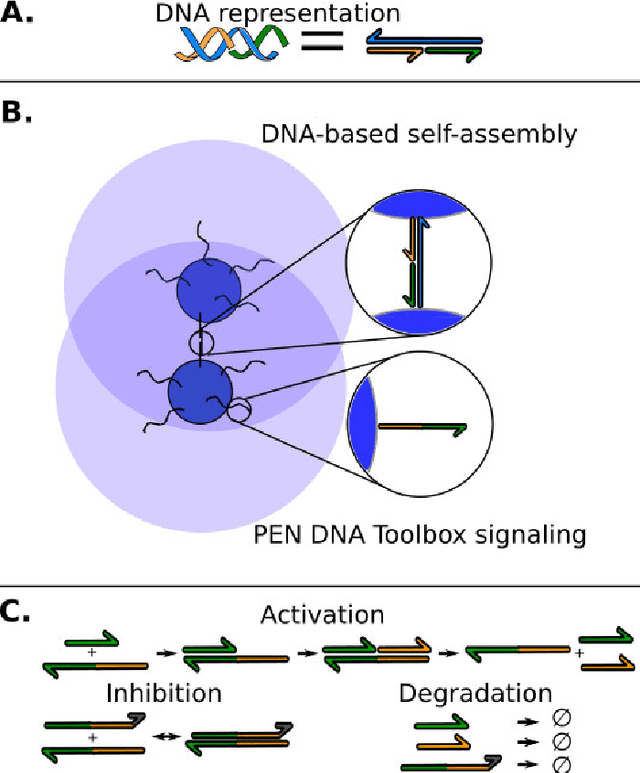

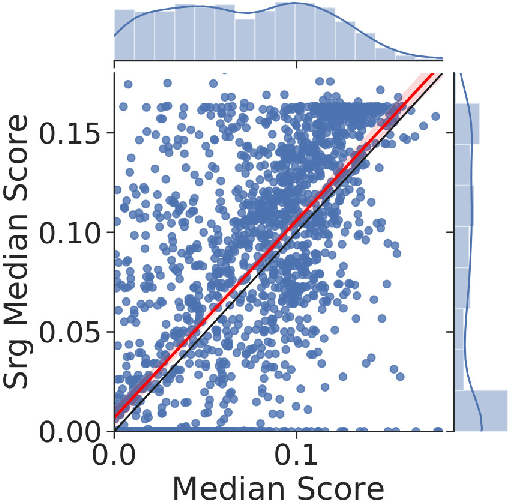
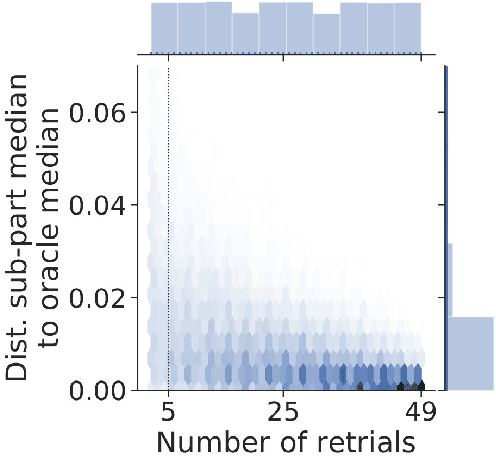
Swarms of molecular robots are a promising approach to create specific shapes at the microscopic scale through self-assembly. However, controlling their behavior is a challenging problem as it involves complex non-linear dynamics and high experimental variability. Hand-crafting a molecular controller will often be time-consuming and give sub-optimal results. Optimization methods, like the bioNEAT algorithm, were previously employed to partially overcome these difficulties, but they still had to cope with deceptive high-dimensional search spaces and computationally expensive simulations. Here, we describe a novel approach to solve this problem by using MAP-Elites, an algorithm that searches for both high-performing and diverse solutions. We then apply it to a molecular robotic framework we recently introduced that allows sensing, signaling and self-assembly at the micro-scale and show that MAP-Elites outperforms previous approaches. Additionally, we propose a surrogate model of micro-robots physics and chemical reaction dynamics to reduce the computational costs of simulation. We show that the resulting methodology is capable of optimizing controllers with similar accuracy as when using only a full-fledged realistic model, with half the computational budget.
Comparing reliability of grid-based Quality-Diversity algorithms using artificial landscapes
Jul 23, 2019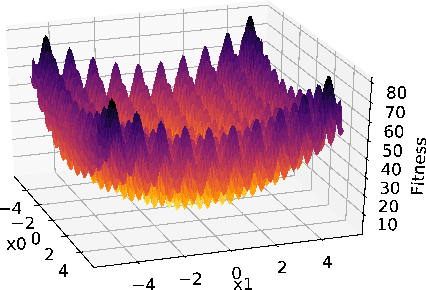
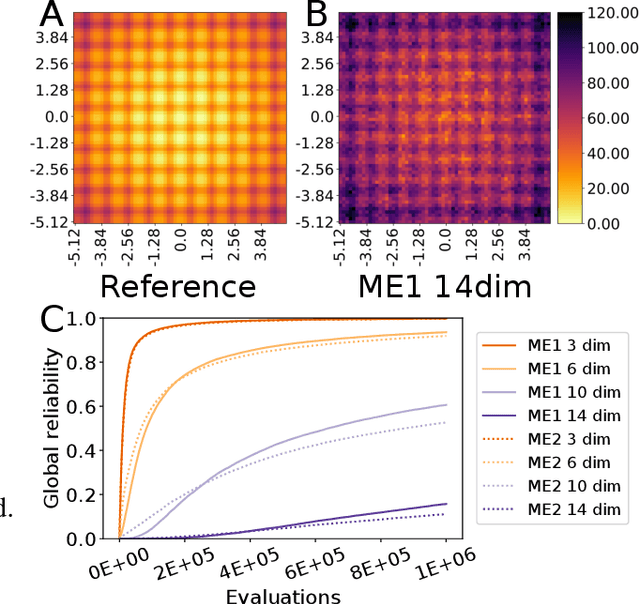
Quality-Diversity (QD) algorithms are a recent type of optimisation methods that search for a collection of both diverse and high performing solutions. They can be used to effectively explore a target problem according to features defined by the user. However, the field of QD still does not possess extensive methodologies and reference benchmarks to compare these algorithms. We propose a simple benchmark to compare the reliability of QD algorithms by optimising the Rastrigin function, an artificial landscape function often used to test global optimisation methods.
* 3 pages, 2 figures
Automatic Calibration of Artificial Neural Networks for Zebrafish Collective Behaviours using a Quality Diversity Algorithm
Jul 22, 2019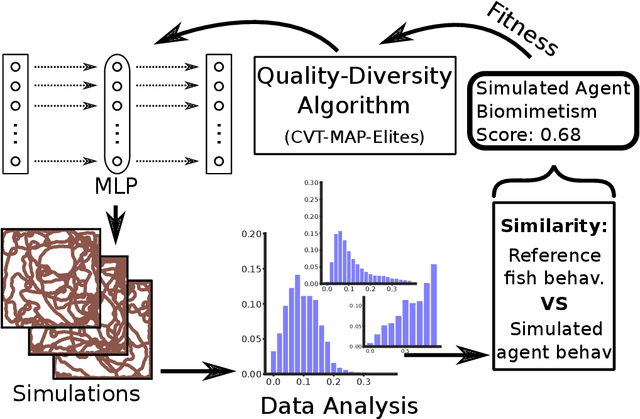


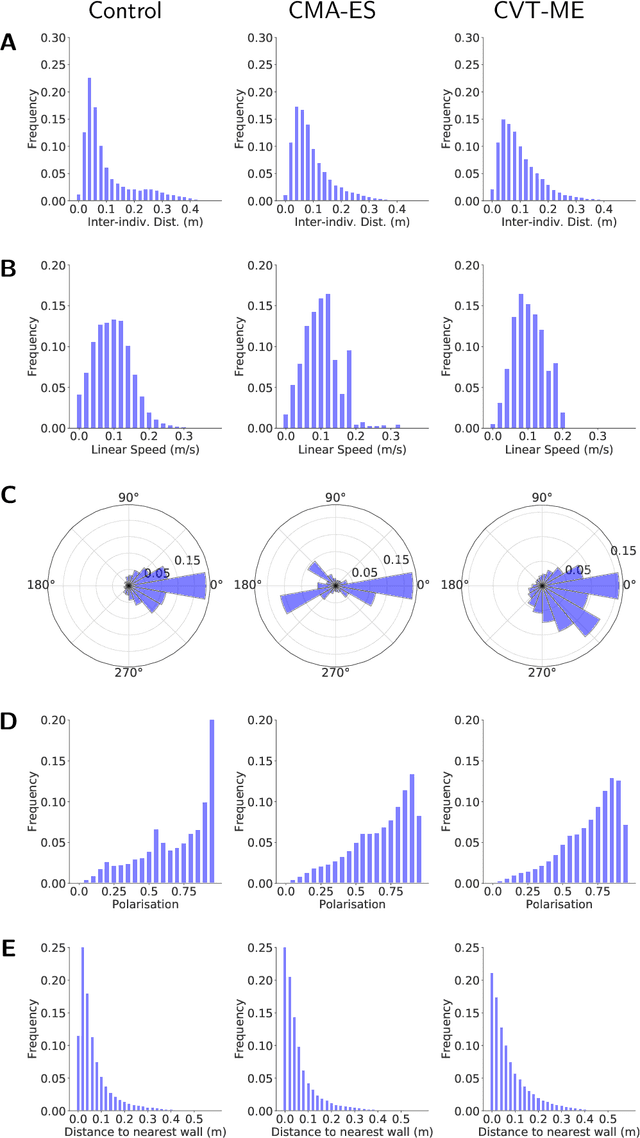
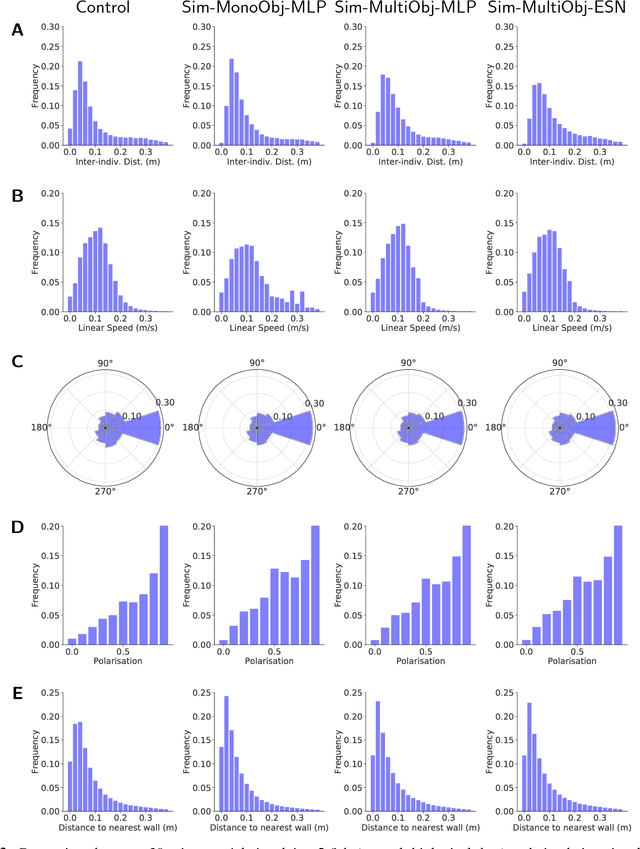
During the last two decades, various models have been proposed for fish collective motion. These models are mainly developed to decipher the biological mechanisms of social interaction between animals. They consider very simple homogeneous unbounded environments and it is not clear that they can simulate accurately the collective trajectories. Moreover when the models are more accurate, the question of their scalability to either larger groups or more elaborate environments remains open. This study deals with learning how to simulate realistic collective motion of collective of zebrafish, using real-world tracking data. The objective is to devise an agent-based model that can be implemented on an artificial robotic fish that can blend into a collective of real fish. We present a novel approach that uses Quality Diversity algorithms, a class of algorithms that emphasise exploration over pure optimisation. In particular, we use CVT-MAP-Elites, a variant of the state-of-the-art MAP-Elites algorithm for high dimensional search space. Results show that Quality Diversity algorithms not only outperform classic evolutionary reinforcement learning methods at the macroscopic level (i.e. group behaviour), but are also able to generate more realistic biomimetic behaviours at the microscopic level (i.e. individual behaviour).
* 8 pages, 4 figures, 1 table
Evolutionary optimisation of neural network models for fish collective behaviours in mixed groups of robots and zebrafish
Aug 09, 2018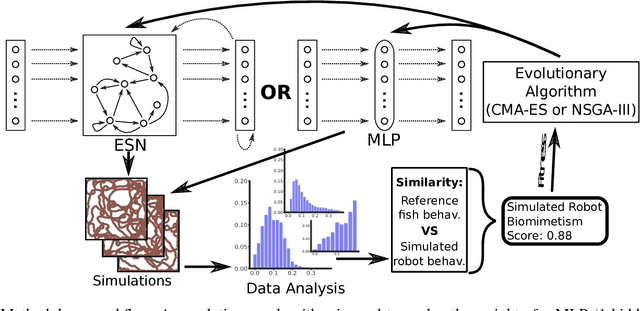


Animal and robot social interactions are interesting both for ethological studies and robotics. On the one hand, the robots can be tools and models to analyse animal collective behaviours, on the other hand, the robots and their artificial intelligence are directly confronted and compared to the natural animal collective intelligence. The first step is to design robots and their behavioural controllers that are capable of socially interact with animals. Designing such behavioural bio-mimetic controllers remains an important challenge as they have to reproduce the animal behaviours and have to be calibrated on experimental data. Most animal collective behavioural models are designed by modellers based on experimental data. This process is long and costly because it is difficult to identify the relevant behavioural features that are then used as a priori knowledge in model building. Here, we want to model the fish individual and collective behaviours in order to develop robot controllers. We explore the use of optimised black-box models based on artificial neural networks (ANN) to model fish behaviours. While the ANN may not be biomimetic but rather bio-inspired, they can be used to link perception to motor responses. These models are designed to be implementable as robot controllers to form mixed-groups of fish and robots, using few a priori knowledge of the fish behaviours. We present a methodology with multilayer perceptron or echo state networks that are optimised through evolutionary algorithms to model accurately the fish individual and collective behaviours in a bounded rectangular arena. We assess the biomimetism of the generated models and compare them to the fish experimental behaviours.
* 10 pages, 4 figures
How to Blend a Robot within a Group of Zebrafish: Achieving Social Acceptance through Real-time Calibration of a Multi-level Behavioural Model
May 29, 2018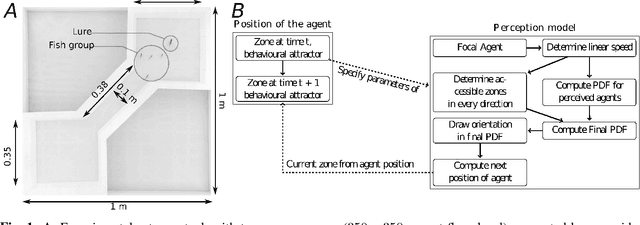


We have previously shown how to socially integrate a fish robot into a group of zebrafish thanks to biomimetic behavioural models. The models have to be calibrated on experimental data to present correct behavioural features. This calibration is essential to enhance the social integration of the robot into the group. When calibrated, the behavioural model of fish behaviour is implemented to drive a robot with closed-loop control of social interactions into a group of zebrafish. This approach can be useful to form mixed-groups, and study animal individual and collective behaviour by using biomimetic autonomous robots capable of responding to the animals in long-standing experiments. Here, we show a methodology for continuous real-time calibration and refinement of multi-level behavioural model. The real-time calibration, by an evolutionary algorithm, is based on simulation of the model to correspond to the observed fish behaviour in real-time. The calibrated model is updated on the robot and tested during the experiments. This method allows to cope with changes of dynamics in fish behaviour. Moreover, each fish presents individual behavioural differences. Thus, each trial is done with naive fish groups that display behavioural variability. This real-time calibration methodology can optimise the robot behaviours during the experiments. Our implementation of this methodology runs on three different computers that perform individual tracking, data-analysis, multi-objective evolutionary algorithms, simulation of the fish robot and adaptation of the robot behavioural models, all in real-time.
Automated optimisation of multi-level models of collective behaviour in a mixed society of animals and robots
Feb 02, 2016



Animal and robotic collective behaviours can exhibit complex dynamics that require multi-level descriptions. Here, we are interested in developing a multi-level modeling framework for the use of robots in studies about animal collective decision-making. In this context, using robots can be useful for validating models in silico, inducing calibrated repetitive stimuli to trigger animal responses or modulating and controlling animal collective behaviour. However, designing appropriate biomimetic robotic behaviour faces a major challenge: how to go from the collective decision dynamics observed with animals to an actual algorithmic implementation in robots. In previous work, this was mainly done by hand, often by taking inspiration from human-designed models. Typically, models of behaviour are either macroscopic, differential equations of the population dynamics, or microscopic,explicit spatio-temporal state of each individual. Only microscopic models can easily be implemented as robot controllers. Here, we address the problem of automating the design of lower level description models that can be implemented in robots and exhibit the same collective dynamics as a given higher level model. We apply evolutionary algorithms to simultaneously optimise the parameters of models accounting for different levels of description. This methodology is applied to an experimentally validated shelter-selection problem solved by gregarious insects and robots. We successfully design and calibrate automatically both a microscopic and a hybrid model exhibiting the same dynamics as a macroscopic one. Our framework can be used for multi-level modeling of collective behaviour in animal or robot populations and bio-hybrid systems.