 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Calibration of Artificial Neural Networks for Zebrafish Collective Behaviours using a Quality Diversity Algorithm
Jul 22, 2019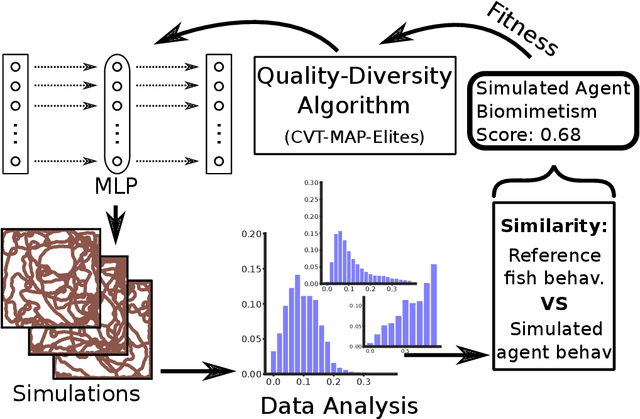


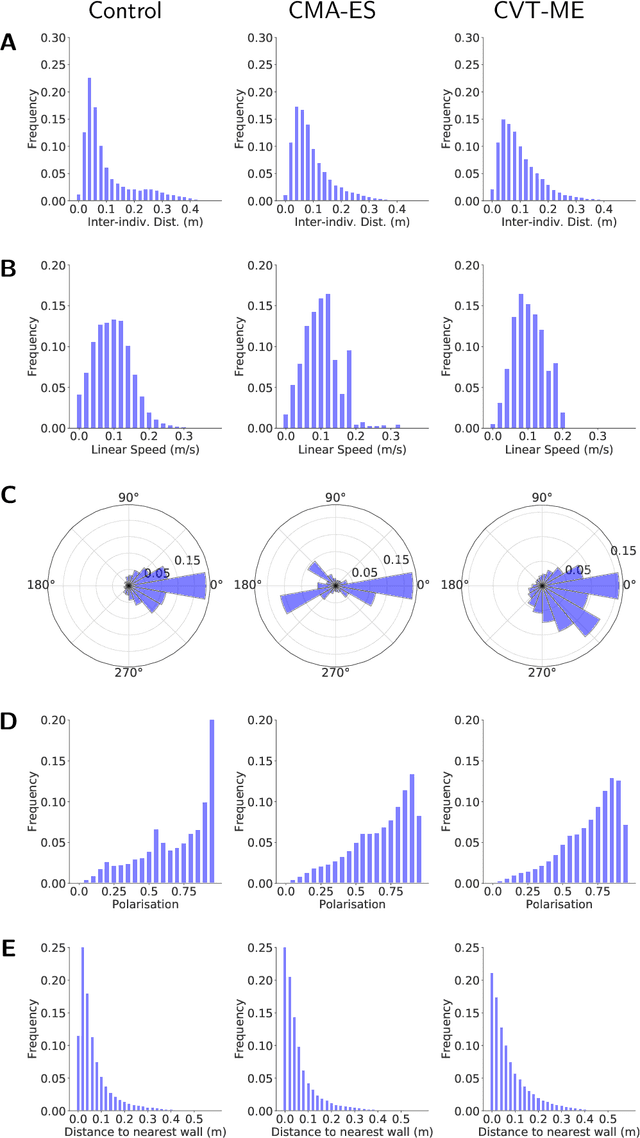
During the last two decades, various models have been proposed for fish collective motion. These models are mainly developed to decipher the biological mechanisms of social interaction between animals. They consider very simple homogeneous unbounded environments and it is not clear that they can simulate accurately the collective trajectories. Moreover when the models are more accurate, the question of their scalability to either larger groups or more elaborate environments remains open. This study deals with learning how to simulate realistic collective motion of collective of zebrafish, using real-world tracking data. The objective is to devise an agent-based model that can be implemented on an artificial robotic fish that can blend into a collective of real fish. We present a novel approach that uses Quality Diversity algorithms, a class of algorithms that emphasise exploration over pure optimisation. In particular, we use CVT-MAP-Elites, a variant of the state-of-the-art MAP-Elites algorithm for high dimensional search space. Results show that Quality Diversity algorithms not only outperform classic evolutionary reinforcement learning methods at the macroscopic level (i.e. group behaviour), but are also able to generate more realistic biomimetic behaviours at the microscopic level (i.e. individual behaviour).
* 8 pages, 4 figures, 1 table
Evolutionary optimisation of neural network models for fish collective behaviours in mixed groups of robots and zebrafish
Aug 09, 2018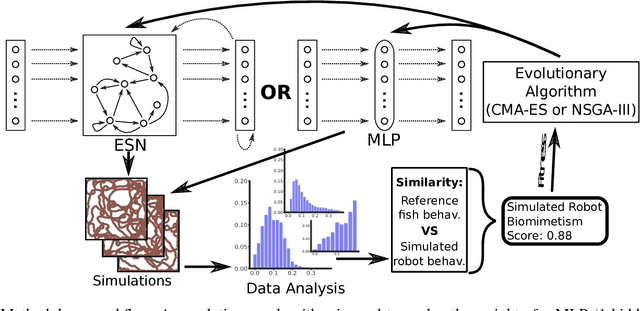

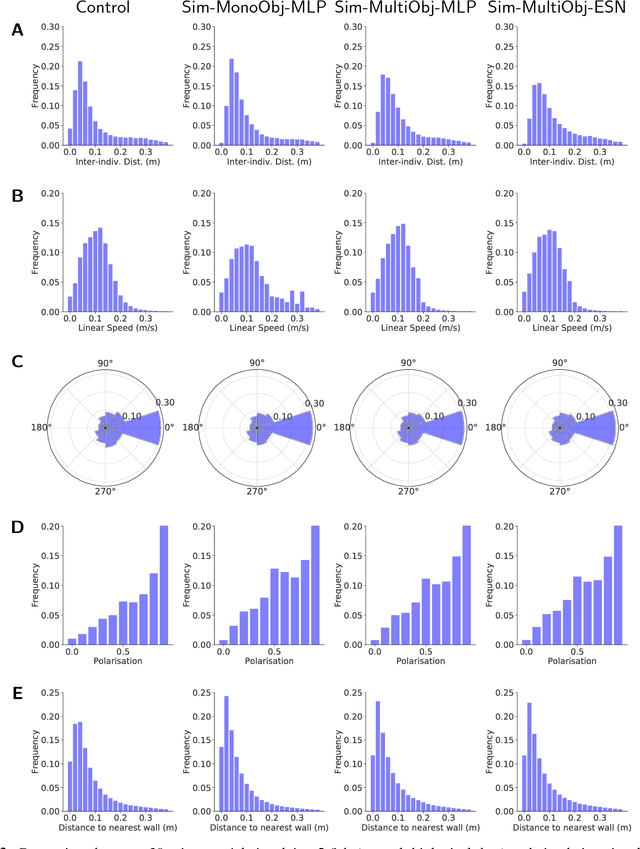

Animal and robot social interactions are interesting both for ethological studies and robotics. On the one hand, the robots can be tools and models to analyse animal collective behaviours, on the other hand, the robots and their artificial intelligence are directly confronted and compared to the natural animal collective intelligence. The first step is to design robots and their behavioural controllers that are capable of socially interact with animals. Designing such behavioural bio-mimetic controllers remains an important challenge as they have to reproduce the animal behaviours and have to be calibrated on experimental data. Most animal collective behavioural models are designed by modellers based on experimental data. This process is long and costly because it is difficult to identify the relevant behavioural features that are then used as a priori knowledge in model building. Here, we want to model the fish individual and collective behaviours in order to develop robot controllers. We explore the use of optimised black-box models based on artificial neural networks (ANN) to model fish behaviours. While the ANN may not be biomimetic but rather bio-inspired, they can be used to link perception to motor responses. These models are designed to be implementable as robot controllers to form mixed-groups of fish and robots, using few a priori knowledge of the fish behaviours. We present a methodology with multilayer perceptron or echo state networks that are optimised through evolutionary algorithms to model accurately the fish individual and collective behaviours in a bounded rectangular arena. We assess the biomimetism of the generated models and compare them to the fish experimental behaviours.
* 10 pages, 4 figures
Automated optimisation of multi-level models of collective behaviour in a mixed society of animals and robots
Feb 02, 2016



Animal and robotic collective behaviours can exhibit complex dynamics that require multi-level descriptions. Here, we are interested in developing a multi-level modeling framework for the use of robots in studies about animal collective decision-making. In this context, using robots can be useful for validating models in silico, inducing calibrated repetitive stimuli to trigger animal responses or modulating and controlling animal collective behaviour. However, designing appropriate biomimetic robotic behaviour faces a major challenge: how to go from the collective decision dynamics observed with animals to an actual algorithmic implementation in robots. In previous work, this was mainly done by hand, often by taking inspiration from human-designed models. Typically, models of behaviour are either macroscopic, differential equations of the population dynamics, or microscopic,explicit spatio-temporal state of each individual. Only microscopic models can easily be implemented as robot controllers. Here, we address the problem of automating the design of lower level description models that can be implemented in robots and exhibit the same collective dynamics as a given higher level model. We apply evolutionary algorithms to simultaneously optimise the parameters of models accounting for different levels of description. This methodology is applied to an experimentally validated shelter-selection problem solved by gregarious insects and robots. We successfully design and calibrate automatically both a microscopic and a hybrid model exhibiting the same dynamics as a macroscopic one. Our framework can be used for multi-level modeling of collective behaviour in animal or robot populations and bio-hybrid systems.