 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCDTB: A Color and Depth Visual Object Tracking Dataset and Benchmark
Jul 01, 2019


A long-term visual object tracking performance evaluation methodology and a benchmark are proposed. Performance measures are designed by following a long-term tracking definition to maximize the analysis probing strength. The new measures outperform existing ones in interpretation potential and in better distinguishing between different tracking behaviors. We show that these measures generalize the short-term performance measures, thus linking the two tracking problems. Furthermore, the new measures are highly robust to temporal annotation sparsity and allow annotation of sequences hundreds of times longer than in the current datasets without increasing manual annotation labor. A new challenging dataset of carefully selected sequences with many target disappearances is proposed. A new tracking taxonomy is proposed to position trackers on the short-term/long-term spectrum. The benchmark contains an extensive evaluation of the largest number of long-term tackers and comparison to state-of-the-art short-term trackers. We analyze the influence of tracking architecture implementations to long-term performance and explore various re-detection strategies as well as influence of visual model update strategies to long-term tracking drift. The methodology is integrated in the VOT toolkit to automate experimental analysis and benchmarking and to facilitate future development of long-term trackers.
Object Tracking by Reconstruction with View-Specific Discriminative Correlation Filters
Nov 27, 2018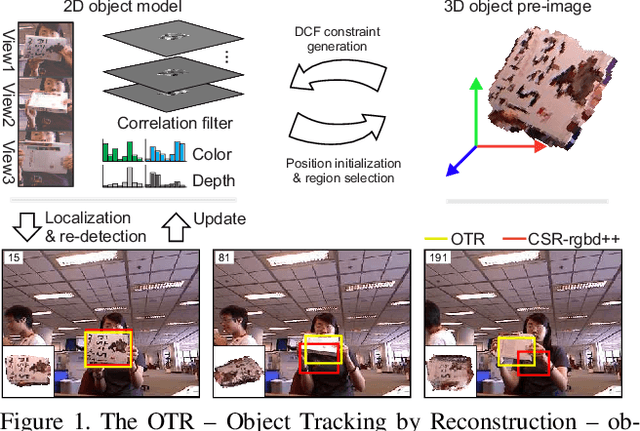
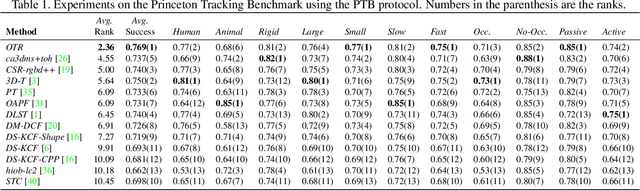
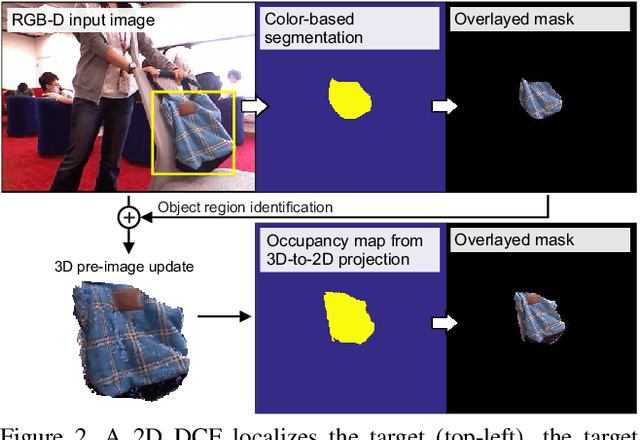
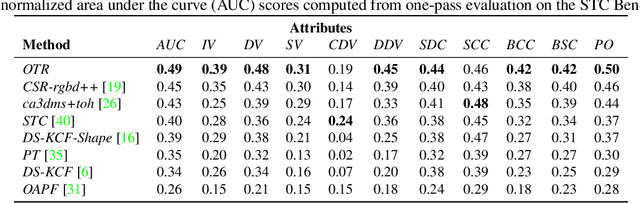
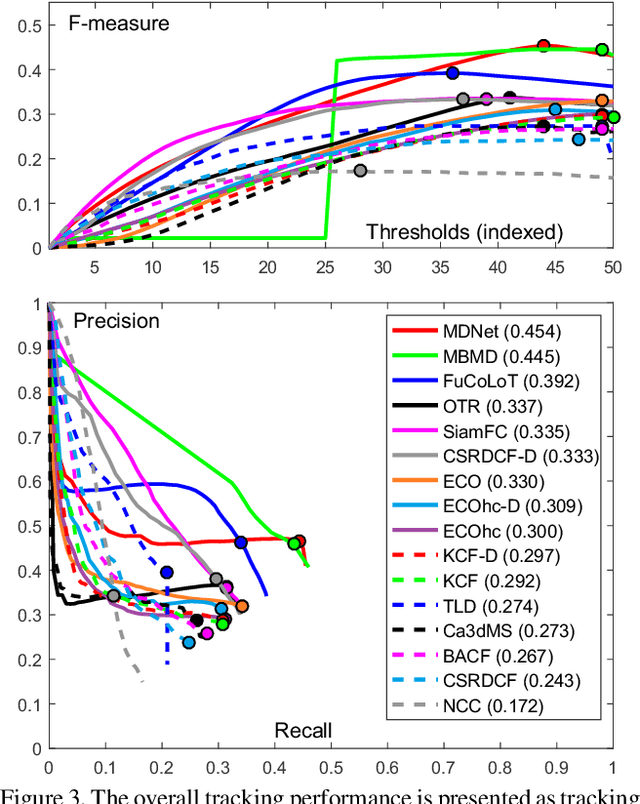
Standard RGB-D trackers treat the target as an inherently 2D structure, which makes modelling appearance changes related even to simple out-of-plane rotation highly challenging. We address this limitation by proposing a novel long-term RGB-D tracker - Object Tracking by Reconstruction (OTR). The tracker performs online 3D target reconstruction to facilitate robust learning of a set of view-specific discriminative correlation filters (DCFs). The 3D reconstruction supports two performance-enhancing features: (i) generation of accurate spatial support for constrained DCF learning from its 2D projection and (ii) point cloud based estimation of 3D pose change for selection and storage of view-specific DCFs which are used to robustly localize the target after out-of-view rotation or heavy occlusion. Extensive evaluation of OTR on the challenging Princeton RGB-D tracking and STC Benchmarks shows it outperforms the state-of-the-art by a large margin.