 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating probabilistic and data-driven inference models for fiber-coupled NV-diamond temperature sensors
Sep 14, 2024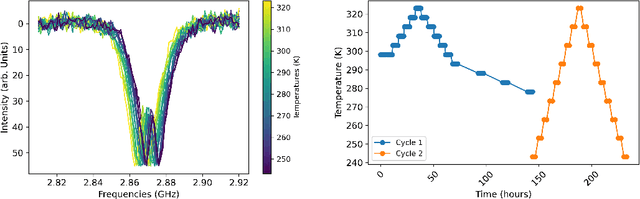
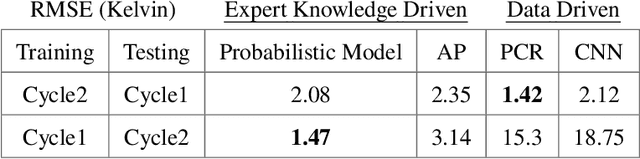
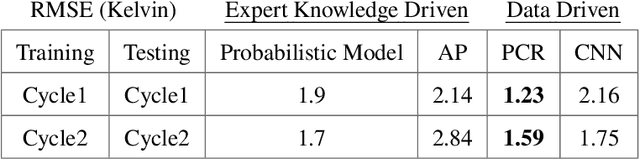
We evaluate the impact of inference model on uncertainties when using continuous wave Optically Detected Magnetic Resonance (ODMR) measurements to infer temperature. Our approach leverages a probabilistic feedforward inference model designed to maximize the likelihood of observed ODMR spectra through automatic differentiation. This model effectively utilizes the temperature dependence of spin Hamiltonian parameters to infer temperature from spectral features in the ODMR data. We achieve prediction uncertainty of $\pm$ 1 K across a temperature range of 243 K to 323 K. To benchmark our probabilistic model, we compare it with a non-parametric peak-finding technique and data-driven methodologies such as Principal Component Regression (PCR) and a 1D Convolutional Neural Network (CNN). We find that when validated against out-of-sample dataset that encompasses the same temperature range as the training dataset, data driven methods can show uncertainties that are as much as 0.67 K lower without incorporating expert-level understanding of the spectroscopic-temperature relationship. However, our results show that the probabilistic model outperforms both PCR and CNN when tasked with extrapolating beyond the temperature range used in training set, indicating robustness and generalizability. In contrast, data-driven methods like PCR and CNN demonstrate up to ten times worse uncertainties when tasked with extrapolating outside their training data range.
On-Manifold Projected Gradient Descent
Aug 23, 2023



This work provides a computable, direct, and mathematically rigorous approximation to the differential geometry of class manifolds for high-dimensional data, along with nonlinear projections from input space onto these class manifolds. The tools are applied to the setting of neural network image classifiers, where we generate novel, on-manifold data samples, and implement a projected gradient descent algorithm for on-manifold adversarial training. The susceptibility of neural networks (NNs) to adversarial attack highlights the brittle nature of NN decision boundaries in input space. Introducing adversarial examples during training has been shown to reduce the susceptibility of NNs to adversarial attack; however, it has also been shown to reduce the accuracy of the classifier if the examples are not valid examples for that class. Realistic "on-manifold" examples have been previously generated from class manifolds in the latent of an autoencoder. Our work explores these phenomena in a geometric and computational setting that is much closer to the raw, high-dimensional input space than can be provided by VAE or other black box dimensionality reductions. We employ conformally invariant diffusion maps (CIDM) to approximate class manifolds in diffusion coordinates, and develop the Nystr\"{o}m projection to project novel points onto class manifolds in this setting. On top of the manifold approximation, we leverage the spectral exterior calculus (SEC) to determine geometric quantities such as tangent vectors of the manifold. We use these tools to obtain adversarial examples that reside on a class manifold, yet fool a classifier. These misclassifications then become explainable in terms of human-understandable manipulations within the data, by expressing the on-manifold adversary in the semantic basis on the manifold.
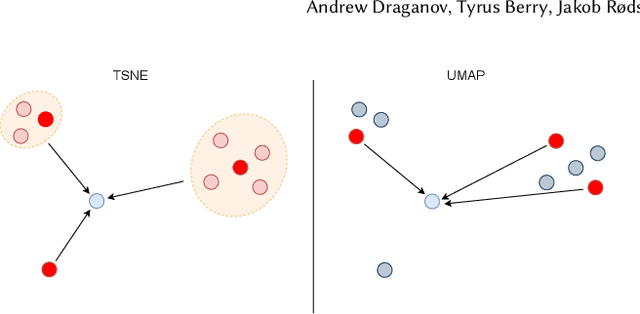
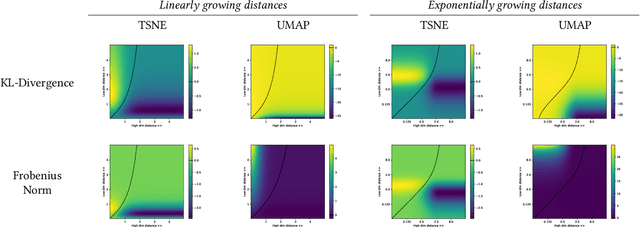
ActUp: Analyzing and Consolidating tSNE and UMAP
May 12, 2023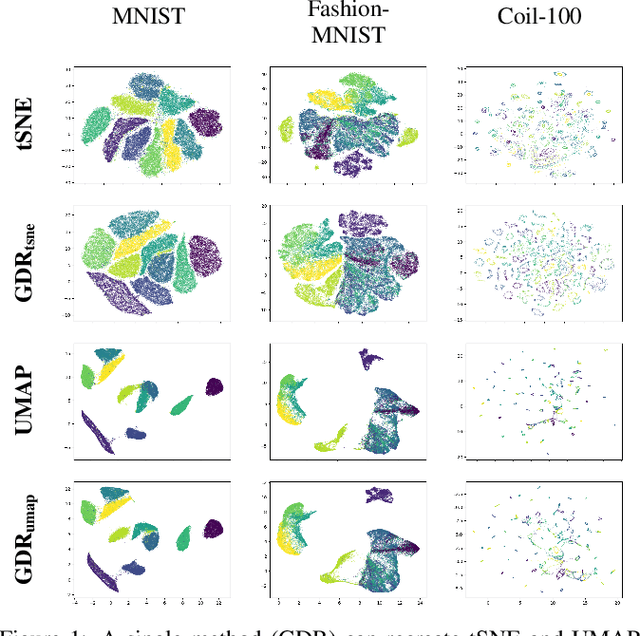

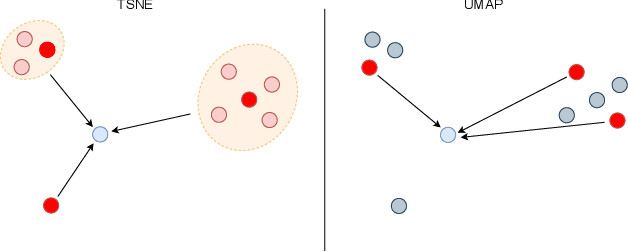
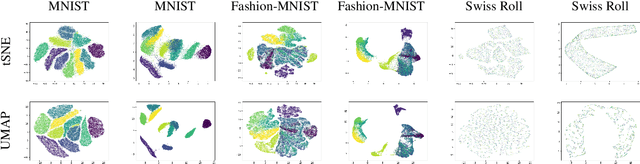
tSNE and UMAP are popular dimensionality reduction algorithms due to their speed and interpretable low-dimensional embeddings. Despite their popularity, however, little work has been done to study their full span of differences. We theoretically and experimentally evaluate the space of parameters in both tSNE and UMAP and observe that a single one -- the normalization -- is responsible for switching between them. This, in turn, implies that a majority of the algorithmic differences can be toggled without affecting the embeddings. We discuss the implications this has on several theoretic claims behind UMAP, as well as how to reconcile them with existing tSNE interpretations. Based on our analysis, we provide a method (\ourmethod) that combines previously incompatible techniques from tSNE and UMAP and can replicate the results of either algorithm. This allows our method to incorporate further improvements, such as an acceleration that obtains either method's outputs faster than UMAP. We release improved versions of tSNE, UMAP, and \ourmethod that are fully plug-and-play with the traditional libraries at https://github.com/Andrew-Draganov/GiDR-DUN
GiDR-DUN; Gradient Dimensionality Reduction -- Differences and Unification
Jun 20, 2022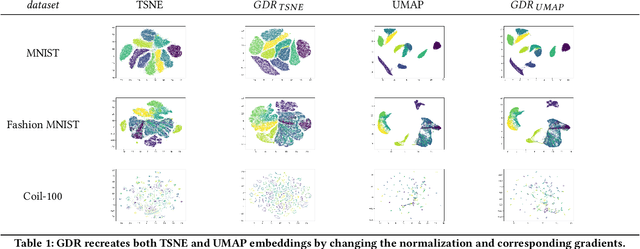

TSNE and UMAP are two of the most popular dimensionality reduction algorithms due to their speed and interpretable low-dimensional embeddings. However, while attempts have been made to improve on TSNE's computational complexity, no existing method can obtain TSNE embeddings at the speed of UMAP. In this work, we show that this is indeed possible by combining the two approaches into a single method. We theoretically and experimentally evaluate the full space of parameters in the TSNE and UMAP algorithms and observe that a single parameter, the normalization, is responsible for switching between them. This, in turn, implies that a majority of the algorithmic differences can be toggled without affecting the embeddings. We discuss the implications this has on several theoretic claims underpinning the UMAP framework, as well as how to reconcile them with existing TSNE interpretations. Based on our analysis, we propose a new dimensionality reduction algorithm, GDR, that combines previously incompatible techniques from TSNE and UMAP and can replicate the results of either algorithm by changing the normalization. As a further advantage, GDR performs the optimization faster than available UMAP methods and thus an order of magnitude faster than available TSNE methods. Our implementation is plug-and-play with the traditional UMAP and TSNE libraries and can be found at github.com/Andrew-Draganov/GiDR-DUN.