 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultilevel Picard approximations and deep neural networks with ReLU, leaky ReLU, and softplus activation overcome the curse of dimensionality when approximating semilinear parabolic partial differential equations in $L^p$-sense
Sep 30, 2024We prove that multilevel Picard approximations and deep neural networks with ReLU, leaky ReLU, and softplus activation are capable of approximating solutions of semilinear Kolmogorov PDEs in $L^\mathfrak{p}$-sense, $\mathfrak{p}\in [2,\infty)$, in the case of gradient-independent, Lipschitz-continuous nonlinearities, while the computational effort of the multilevel Picard approximations and the required number of parameters in the neural networks grow at most polynomially in both dimension $d\in \mathbb{N}$ and reciprocal of the prescribed accuracy $\epsilon$.
SHANGUS: Deep Reinforcement Learning Meets Heuristic Optimization for Speedy Frontier-Based Exploration of Autonomous Vehicles in Unknown Spaces
Jul 26, 2024This paper introduces SHANGUS, an advanced framework combining Deep Reinforcement Learning (DRL) with heuristic optimization to improve frontier-based exploration efficiency in unknown environments, particularly for intelligent vehicles in autonomous air services, search and rescue operations, and space exploration robotics. SHANGUS harnesses DRL's adaptability and heuristic prioritization, markedly enhancing exploration efficiency, reducing completion time, and minimizing travel distance. The strategy involves a frontier selection node to identify unexplored areas and a DRL navigation node using the Twin Delayed Deep Deterministic Policy Gradient (TD3) algorithm for robust path planning and dynamic obstacle avoidance. Extensive experiments in ROS2 and Gazebo simulation environments show SHANGUS surpasses representative traditional methods like the Nearest Frontier (NF), Novel Frontier-Based Exploration Algorithm (CFE), and Goal-Driven Autonomous Exploration (GDAE) algorithms, especially in complex scenarios, excelling in completion time, travel distance, and exploration rate. This scalable solution is suitable for real-time autonomous navigation in fields such as industrial automation, autonomous driving, household robotics, and space exploration. Future research will integrate additional sensory inputs and refine heuristic functions to further boost SHANGUS's efficiency and robustness.
AAM-VDT: Vehicle Digital Twin for Tele-Operations in Advanced Air Mobility
Apr 15, 2024



This study advanced tele-operations in Advanced Air Mobility (AAM) through the creation of a Vehicle Digital Twin (VDT) system for eVTOL aircraft, tailored to enhance remote control safety and efficiency, especially for Beyond Visual Line of Sight (BVLOS) operations. By synergizing digital twin technology with immersive Virtual Reality (VR) interfaces, we notably elevate situational awareness and control precision for remote operators. Our VDT framework integrates immersive tele-operation with a high-fidelity aerodynamic database, essential for authentically simulating flight dynamics and control tactics. At the heart of our methodology lies an eVTOL's high-fidelity digital replica, placed within a simulated reality that accurately reflects physical laws, enabling operators to manage the aircraft via a master-slave dynamic, substantially outperforming traditional 2D interfaces. The architecture of the designed system ensures seamless interaction between the operator, the digital twin, and the actual aircraft, facilitating exact, instantaneous feedback. Experimental assessments, involving propulsion data gathering, simulation database fidelity verification, and tele-operation testing, verify the system's capability in precise control command transmission and maintaining the digital-physical eVTOL synchronization. Our findings underscore the VDT system's potential in augmenting AAM efficiency and safety, paving the way for broader digital twin application in autonomous aerial vehicles.
Neural Multigrid Memory For Computational Fluid Dynamics
Jun 24, 2023Turbulent flow simulation plays a crucial role in various applications, including aircraft and ship design, industrial process optimization, and weather prediction. In this paper, we propose an advanced data-driven method for simulating turbulent flow, representing a significant improvement over existing approaches. Our methodology combines the strengths of Video Prediction Transformer (VPTR) (Ye & Bilodeau, 2022) and Multigrid Architecture (MgConv, MgResnet) (Ke et al., 2017). VPTR excels in capturing complex spatiotemporal dependencies and handling large input data, making it a promising choice for turbulent flow prediction. Meanwhile, Multigrid Architecture utilizes multiple grids with different resolutions to capture the multiscale nature of turbulent flows, resulting in more accurate and efficient simulations. Through our experiments, we demonstrate the effectiveness of our proposed approach, named MGxTransformer, in accurately predicting velocity, temperature, and turbulence intensity for incompressible turbulent flows across various geometries and flow conditions. Our results exhibit superior accuracy compared to other baselines, while maintaining computational efficiency. Our implementation in PyTorch is available publicly at https://github.com/Combi2k2/MG-Turbulent-Flow
Deep Learning Approach for Receipt Recognition
May 30, 2019
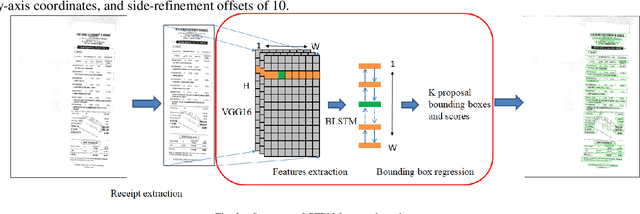


Inspired by the recent successes of deep learning on Computer Vision and Natural Language Processing, we present a deep learning approach for recognizing scanned receipts. The recognition system has two main modules: text detection based on Connectionist Text Proposal Network and text recognition based on Attention-based Encoder-Decoder. We also proposed pre-processing to extract receipt area and OCR verification to ignore handwriting. The experiments on the dataset of the Robust Reading Challenge on Scanned Receipts OCR and Information Extraction 2019 demonstrate that the accuracies were improved by integrating the pre-processing and the OCR verification. Our recognition system achieved 71.9% of the F1 score for detection and recognition task.