 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntropy-regularized Point-based Value Iteration
Feb 14, 2024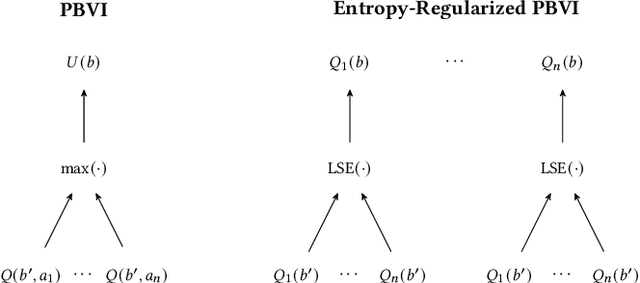

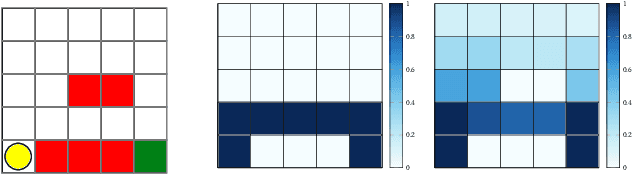

Model-based planners for partially observable problems must accommodate both model uncertainty during planning and goal uncertainty during objective inference. However, model-based planners may be brittle under these types of uncertainty because they rely on an exact model and tend to commit to a single optimal behavior. Inspired by results in the model-free setting, we propose an entropy-regularized model-based planner for partially observable problems. Entropy regularization promotes policy robustness for planning and objective inference by encouraging policies to be no more committed to a single action than necessary. We evaluate the robustness and objective inference performance of entropy-regularized policies in three problem domains. Our results show that entropy-regularized policies outperform non-entropy-regularized baselines in terms of higher expected returns under modeling errors and higher accuracy during objective inference.
Algorithms for Verifying Deep Neural Networks
Mar 15, 2019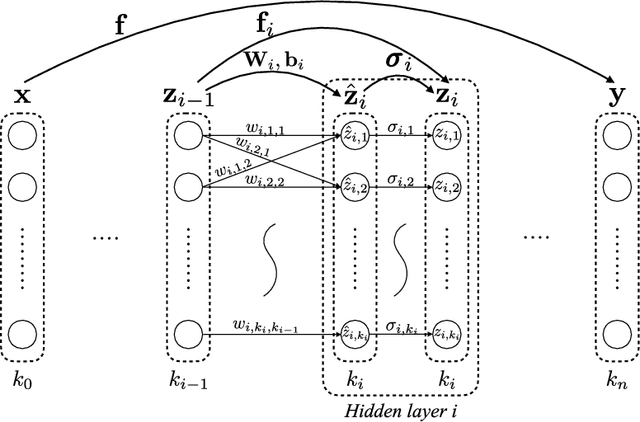
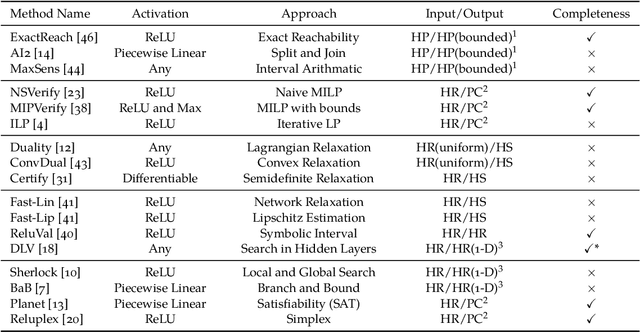
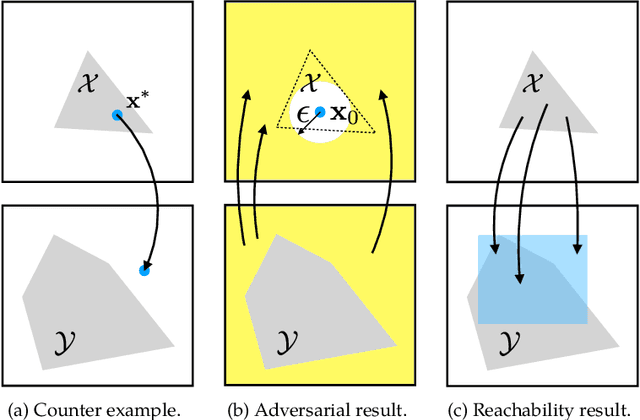

Deep neural networks are widely used for nonlinear function approximation with applications ranging from computer vision to control. Although these networks involve the composition of simple arithmetic operations, it can be very challenging to verify whether a particular network satisfies certain input-output properties. This article surveys methods that have emerged recently for soundly verifying such properties. These methods borrow insights from reachability analysis, optimization, and search. We discuss fundamental differences and connections between existing algorithms. In addition, we provide pedagogical implementations of existing methods and compare them on a set of benchmark problems.