 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntropy-regularized Point-based Value Iteration
Paper and Code
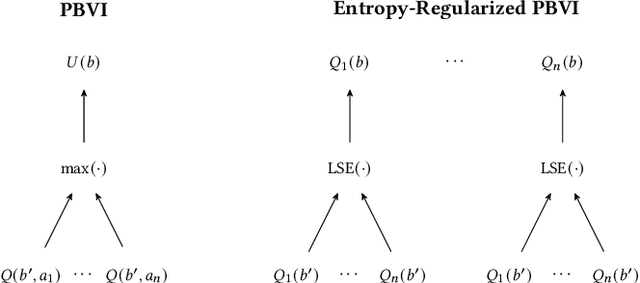


Model-based planners for partially observable problems must accommodate both model uncertainty during planning and goal uncertainty during objective inference. However, model-based planners may be brittle under these types of uncertainty because they rely on an exact model and tend to commit to a single optimal behavior. Inspired by results in the model-free setting, we propose an entropy-regularized model-based planner for partially observable problems. Entropy regularization promotes policy robustness for planning and objective inference by encouraging policies to be no more committed to a single action than necessary. We evaluate the robustness and objective inference performance of entropy-regularized policies in three problem domains. Our results show that entropy-regularized policies outperform non-entropy-regularized baselines in terms of higher expected returns under modeling errors and higher accuracy during objective inference.