 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArriving on time: estimating travel time distributions on large-scale road networks
Feb 26, 2013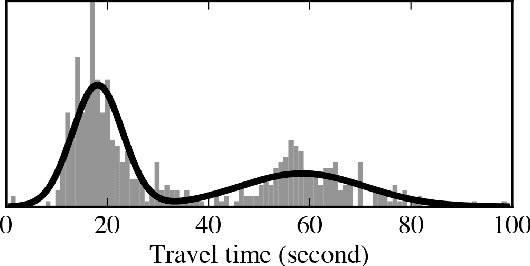
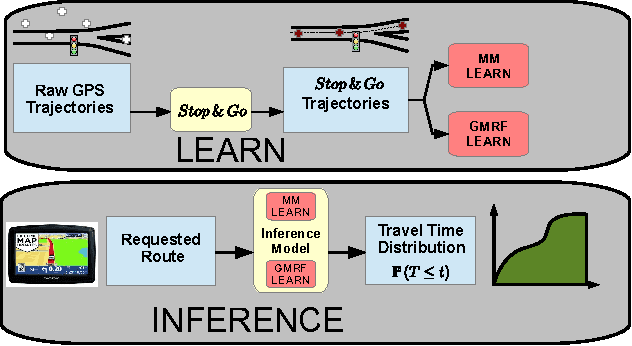
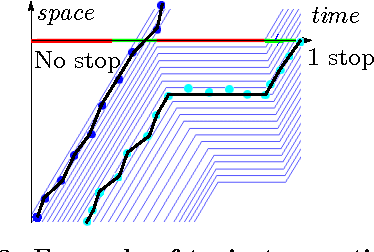
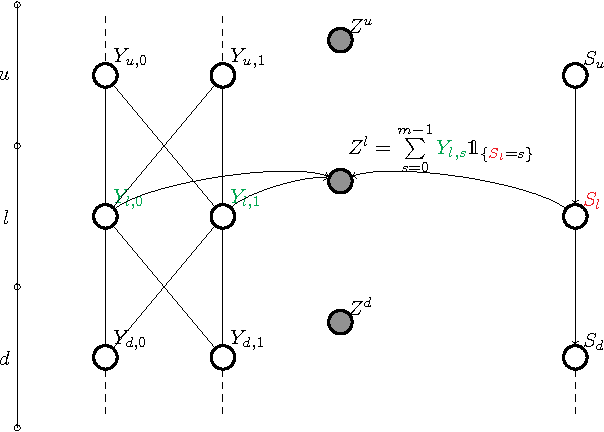
Most optimal routing problems focus on minimizing travel time or distance traveled. Oftentimes, a more useful objective is to maximize the probability of on-time arrival, which requires statistical distributions of travel times, rather than just mean values. We propose a method to estimate travel time distributions on large-scale road networks, using probe vehicle data collected from GPS. We present a framework that works with large input of data, and scales linearly with the size of the network. Leveraging the planar topology of the graph, the method computes efficiently the time correlations between neighboring streets. First, raw probe vehicle traces are compressed into pairs of travel times and number of stops for each traversed road segment using a `stop-and-go' algorithm developed for this work. The compressed data is then used as input for training a path travel time model, which couples a Markov model along with a Gaussian Markov random field. Finally, scalable inference algorithms are developed for obtaining path travel time distributions from the composite MM-GMRF model. We illustrate the accuracy and scalability of our model on a 505,000 road link network spanning the San Francisco Bay Area.
Large Scale Estimation in Cyberphysical Systems using Streaming Data: a Case Study with Smartphone Traces
Dec 14, 2012
Controlling and analyzing cyberphysical and robotics systems is increasingly becoming a Big Data challenge. Pushing this data to, and processing in the cloud is more efficient than on-board processing. However, current cloud-based solutions are not suitable for the latency requirements of these applications. We present a new concept, Discretized Streams or D-Streams, that enables massively scalable computations on streaming data with latencies as short as a second. We experiment with an implementation of D-Streams on top of the Spark computing framework. We demonstrate the usefulness of this concept with a novel algorithm to estimate vehicular traffic in urban networks. Our online EM algorithm can estimate traffic on a very large city network (the San Francisco Bay Area) by processing tens of thousands of observations per second, with a latency of a few seconds.
The path inference filter: model-based low-latency map matching of probe vehicle data
Jun 20, 2012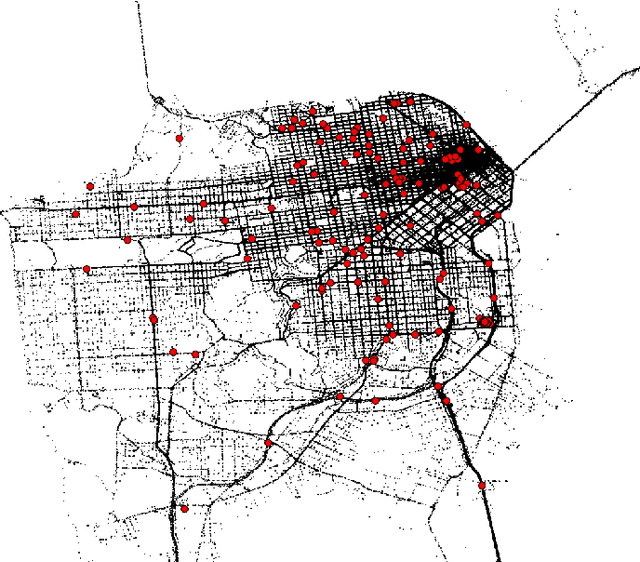


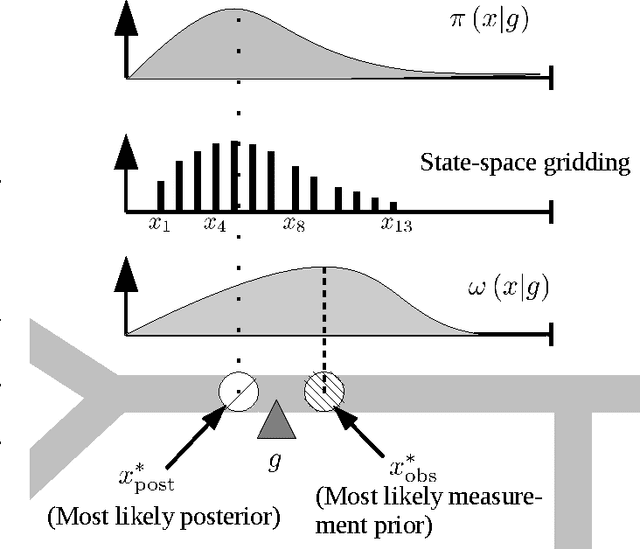
We consider the problem of reconstructing vehicle trajectories from sparse sequences of GPS points, for which the sampling interval is between 10 seconds and 2 minutes. We introduce a new class of algorithms, called altogether path inference filter (PIF), that maps GPS data in real time, for a variety of trade-offs and scenarios, and with a high throughput. Numerous prior approaches in map-matching can be shown to be special cases of the path inference filter presented in this article. We present an efficient procedure for automatically training the filter on new data, with or without ground truth observations. The framework is evaluated on a large San Francisco taxi dataset and is shown to improve upon the current state of the art. This filter also provides insights about driving patterns of drivers. The path inference filter has been deployed at an industrial scale inside the Mobile Millennium traffic information system, and is used to map fleets of data in San Francisco, Sacramento, Stockholm and Porto.