 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially Pertinent Robots in Gerontological Healthcare
Apr 11, 2024
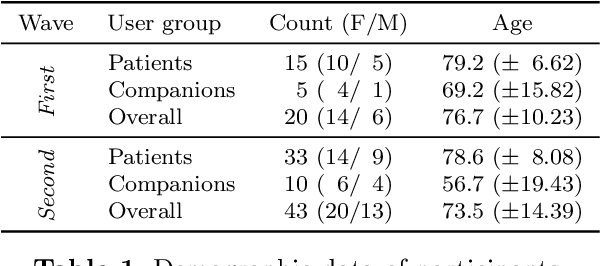
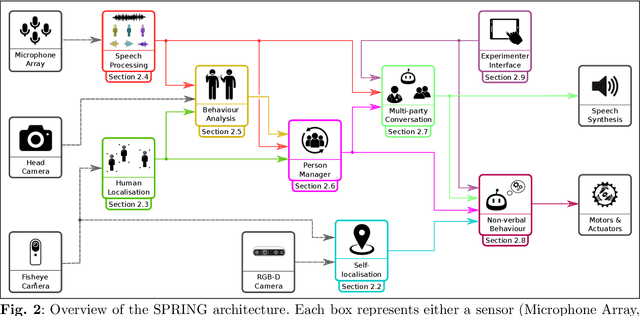
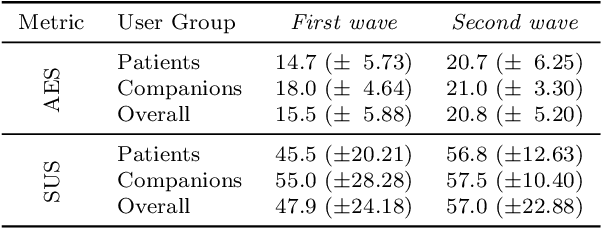
Despite the many recent achievements in developing and deploying social robotics, there are still many underexplored environments and applications for which systematic evaluation of such systems by end-users is necessary. While several robotic platforms have been used in gerontological healthcare, the question of whether or not a social interactive robot with multi-modal conversational capabilities will be useful and accepted in real-life facilities is yet to be answered. This paper is an attempt to partially answer this question, via two waves of experiments with patients and companions in a day-care gerontological facility in Paris with a full-sized humanoid robot endowed with social and conversational interaction capabilities. The software architecture, developed during the H2020 SPRING project, together with the experimental protocol, allowed us to evaluate the acceptability (AES) and usability (SUS) with more than 60 end-users. Overall, the users are receptive to this technology, especially when the robot perception and action skills are robust to environmental clutter and flexible to handle a plethora of different interactions.
Intrinsic Motivation and Episodic Memories for Robot Exploration of High-Dimensional Sensory Spaces
Jan 07, 2020
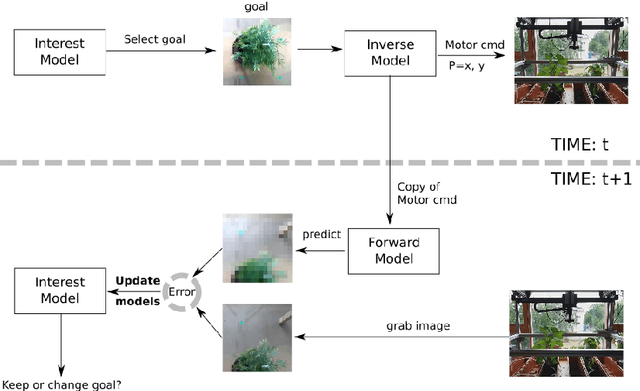
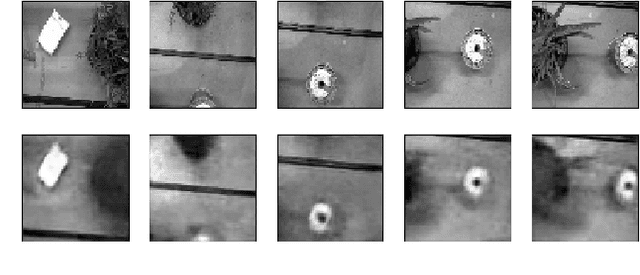
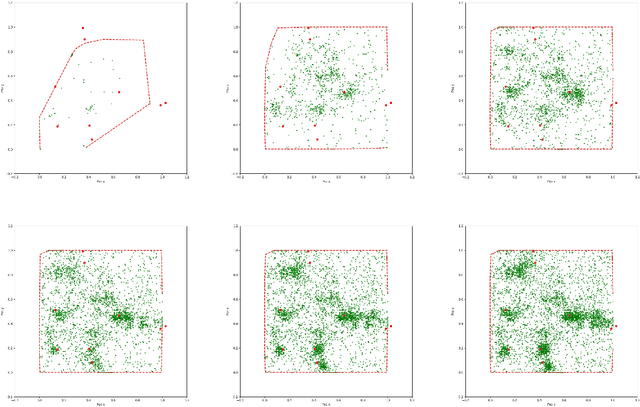
This work presents an architecture that generates curiosity-driven goal-directed exploration behaviours for an image sensor of a microfarming robot. A combination of deep neural networks for offline unsupervised learning of low-dimensional features from images, and of online learning of shallow neural networks representing the inverse and forward kinematics of the system have been used. The artificial curiosity system assigns interest values to a set of pre-defined goals, and drives the exploration towards those that are expected to maximise the learning progress. We propose the integration of an episodic memory in intrinsic motivation systems to face catastrophic forgetting issues, typically experienced when performing online updates of artificial neural networks. Our results show that adopting an episodic memory system not only prevents the computational models from quickly forgetting knowledge that has been previously acquired, but also provides new avenues for modulating the balance between plasticity and stability of the models.