 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Localisation between Range Sensors and Overhead Imagery
Jun 03, 2020
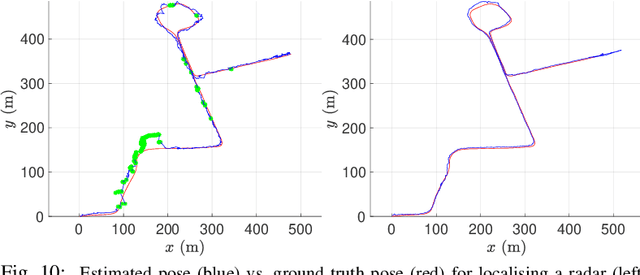
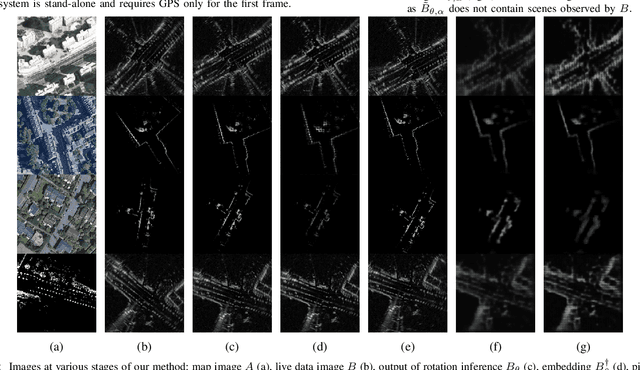

Publicly available satellite imagery can be an ubiquitous, cheap, and powerful tool for vehicle localisation when a prior sensor map is unavailable. However, satellite images are not directly comparable to data from ground range sensors because of their starkly different modalities. We present a learned metric localisation method that not only handles the modality difference, but is cheap to train, learning in a self-supervised fashion without metrically accurate ground truth. By evaluating across multiple real-world datasets, we demonstrate the robustness and versatility of our method for various sensor configurations. We pay particular attention to the use of millimetre wave radar, which, owing to its complex interaction with the scene and its immunity to weather and lighting, makes for a compelling and valuable use case.
RSL-Net: Localising in Satellite Images From a Radar on the Ground
Feb 06, 2020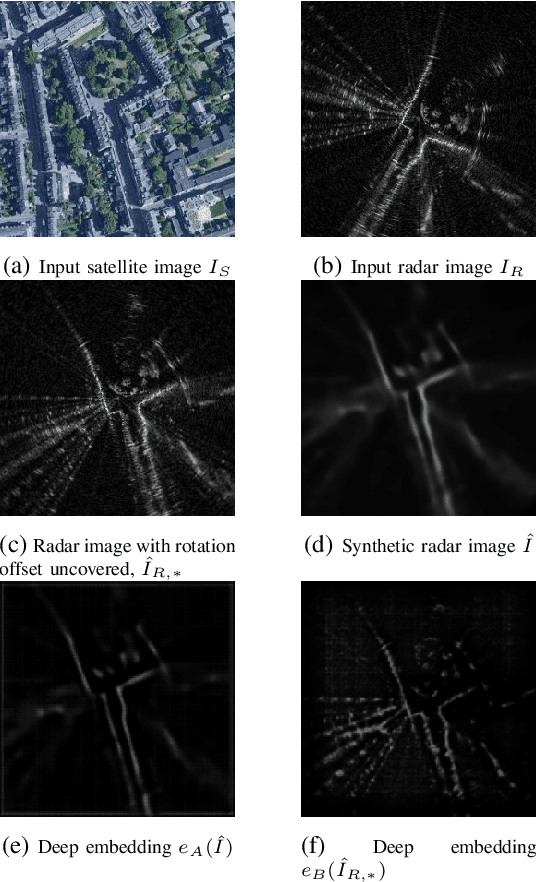
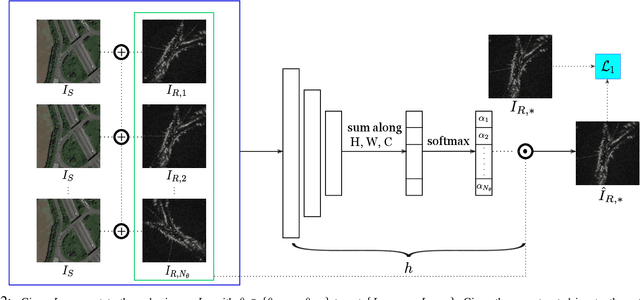

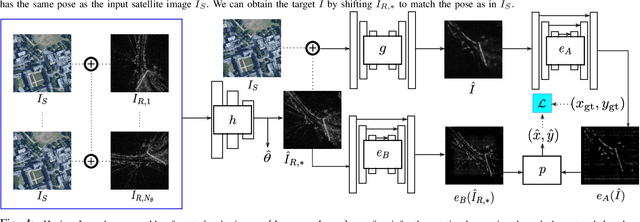
This paper is about localising a vehicle in an overhead image using FMCW radar mounted on a ground vehicle. FMCW radar offers extraordinary promise and efficacy for vehicle localisation. It is impervious to all weather types and lighting conditions. However the complexity of the interactions between millimetre radar wave and the physical environment makes it a challenging domain. Infrastructure-free large-scale radar-based localisation is in its infancy. Typically here a map is built and suitable techniques, compatible with the nature of sensor, are brought to bear. In this work we eschew the need for a radar-based map; instead we simply use an overhead image -- a resource readily available everywhere. This paper introduces a method that not only naturally deals with the complexity of the signal type but does so in the context of cross modal processing.
A White-Noise-On-Jerk Motion Prior for Continuous-Time Trajectory Estimation on SE
Jan 12, 2019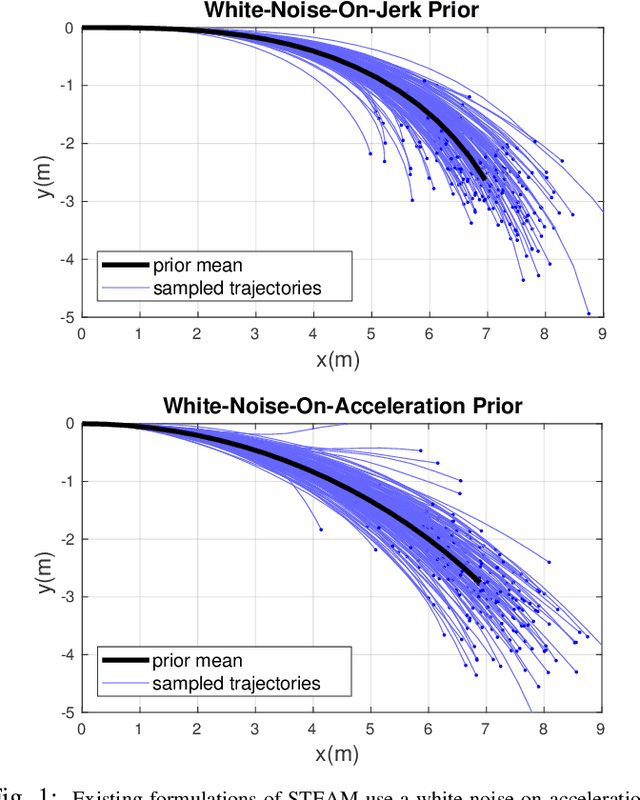
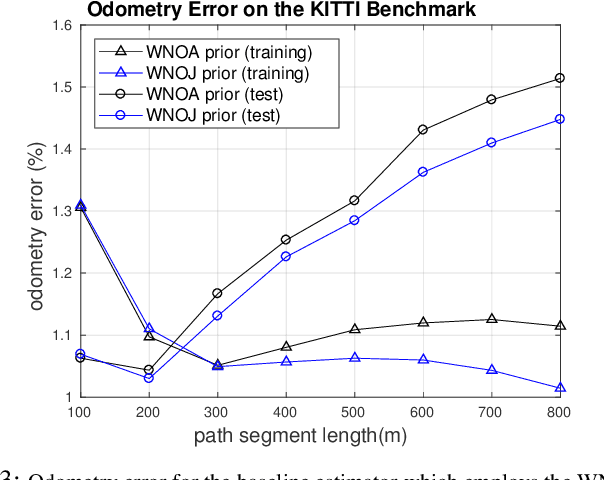
Simultaneous trajectory estimation and mapping (STEAM) offers an efficient approach to continuous-time trajectory estimation, by representing the trajectory as a Gaussian process (GP). Previous formulations of the STEAM framework use a GP prior that assumes white-noise-on-acceleration, with the prior mean encouraging constant body-centric velocity. We show that such a prior cannot sufficiently represent trajectory sections with non-zero acceleration, resulting in a bias to the posterior estimates. This paper derives a novel motion prior that assumes white-noise-on-jerk, where the prior mean encourages constant body-centric acceleration. With the new prior, we formulate a variation of STEAM that estimates the pose, body-centric velocity, and body-centric acceleration. By evaluating across several datasets, we show that the new prior greatly outperforms the white-noise-on-acceleration prior in terms of solution accuracy.
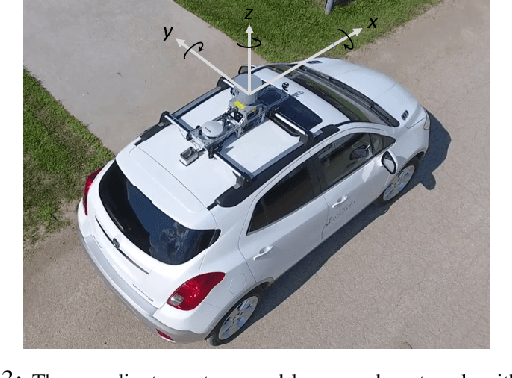
Mapless Online Detection of Dynamic Objects in 3D Lidar
Sep 19, 2018
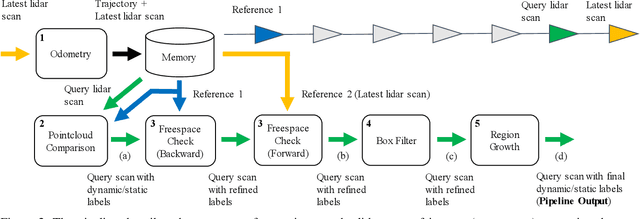


This paper presents a model-free, setting-independent method for online detection of dynamic objects in 3D lidar data. We explicitly compensate for the moving-while-scanning operation (motion distortion) of present-day 3D spinning lidar sensors. Our detection method uses a motion-compensated freespace querying algorithm and classifies between dynamic (currently moving) and static (currently stationary) labels at the point level. For a quantitative analysis, we establish a benchmark with motion-distorted lidar data using CARLA, an open-source simulator for autonomous driving research. We also provide a qualitative analysis with real data using a Velodyne HDL-64E in driving scenarios. Compared to existing 3D lidar methods that are model-free, our method is unique because of its setting independence and compensation for pointcloud motion distortion.
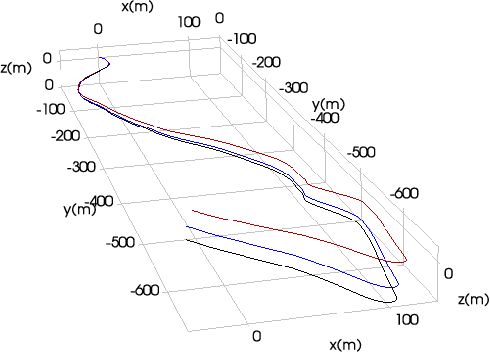
Learning a Bias Correction for Lidar-only Motion Estimation
Aug 27, 2018


This paper presents a novel technique to correct for bias in a classical estimator using a learning approach. We apply a learned bias correction to a lidar-only motion estimation pipeline. Our technique trains a Gaussian process (GP) regression model using data with ground truth. The inputs to the model are high-level features derived from the geometry of the point-clouds, and the outputs are the predicted biases between poses computed by the estimator and the ground truth. The predicted biases are applied as a correction to the poses computed by the estimator. Our technique is evaluated on over 50km of lidar data, which includes the KITTI odometry benchmark and lidar datasets collected around the University of Toronto campus. After applying the learned bias correction, we obtained significant improvements to lidar odometry in all datasets tested. We achieved around 10% reduction in errors on all datasets from an already accurate lidar odometry algorithm, at the expense of only less than 1% increase in computational cost at run-time.