 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapless Online Detection of Dynamic Objects in 3D Lidar
Paper and Code
Sep 19, 2018
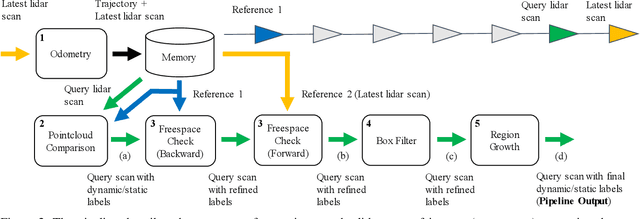


This paper presents a model-free, setting-independent method for online detection of dynamic objects in 3D lidar data. We explicitly compensate for the moving-while-scanning operation (motion distortion) of present-day 3D spinning lidar sensors. Our detection method uses a motion-compensated freespace querying algorithm and classifies between dynamic (currently moving) and static (currently stationary) labels at the point level. For a quantitative analysis, we establish a benchmark with motion-distorted lidar data using CARLA, an open-source simulator for autonomous driving research. We also provide a qualitative analysis with real data using a Velodyne HDL-64E in driving scenarios. Compared to existing 3D lidar methods that are model-free, our method is unique because of its setting independence and compensation for pointcloud motion distortion.