 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMind the Exit Pupil Gap: Revisiting the Intrinsics of a Standard Plenoptic Camera
Feb 20, 2024



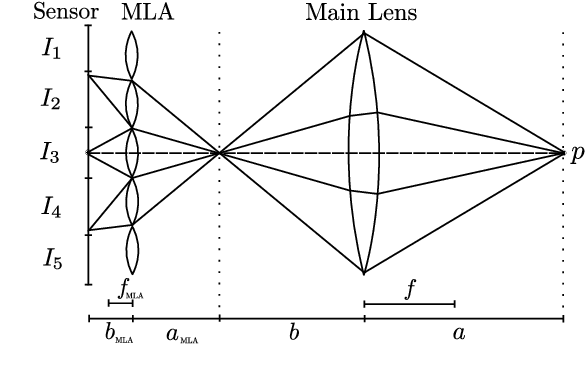
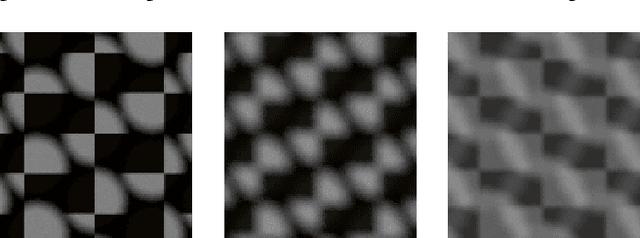
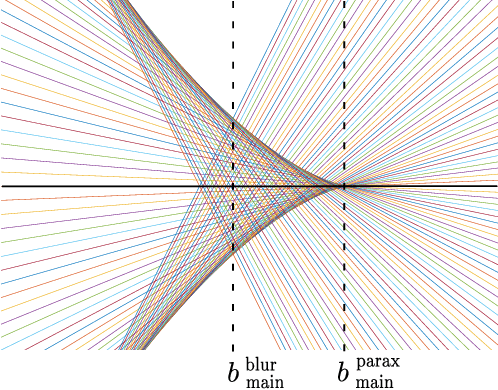
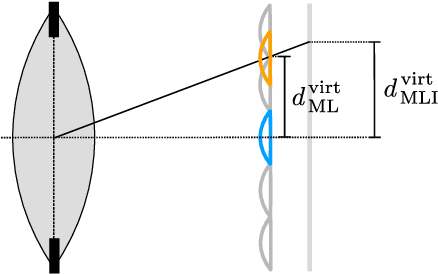
Among the common applications of plenoptic cameras are depth reconstruction and post-shot refocusing. These require a calibration relating the camera-side light field to that of the scene. Numerous methods with this goal have been developed based on thin lens models for the plenoptic camera's main lens and microlenses. Our work addresses the often-overlooked role of the main lens exit pupil in these models and specifically in the decoding process of standard plenoptic camera (SPC) images. We formally deduce the connection between the refocusing distance and the resampling parameter for the decoded light field and provide an analysis of the errors that arise when the exit pupil is not considered. In addition, previous work is revisited with respect to the exit pupil's role and all theoretical results are validated through a ray-tracing-based simulation. With the public release of the evaluated SPC designs alongside our simulation and experimental data we aim to contribute to a more accurate and nuanced understanding of plenoptic camera optics.
Label Smarter, Not Harder: CleverLabel for Faster Annotation of Ambiguous Image Classification with Higher Quality
May 22, 2023



High-quality data is crucial for the success of machine learning, but labeling large datasets is often a time-consuming and costly process. While semi-supervised learning can help mitigate the need for labeled data, label quality remains an open issue due to ambiguity and disagreement among annotators. Thus, we use proposal-guided annotations as one option which leads to more consistency between annotators. However, proposing a label increases the probability of the annotators deciding in favor of this specific label. This introduces a bias which we can simulate and remove. We propose a new method CleverLabel for Cost-effective LabEling using Validated proposal-guidEd annotations and Repaired LABELs. CleverLabel can reduce labeling costs by up to 30.0%, while achieving a relative improvement in Kullback-Leibler divergence of up to 29.8% compared to the previous state-of-the-art on a multi-domain real-world image classification benchmark. CleverLabel offers a novel solution to the challenge of efficiently labeling large datasets while also improving the label quality.
Simulation of Plenoptic Cameras
Mar 09, 2022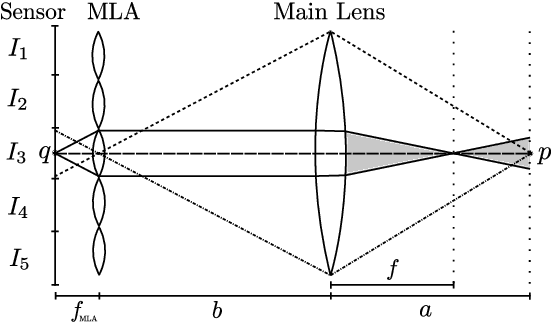


Plenoptic cameras enable the capturing of spatial as well as angular color information which can be used for various applications among which are image refocusing and depth calculations. However, these cameras are expensive and research in this area currently lacks data for ground truth comparisons. In this work we describe a flexible, easy-to-use Blender model for the different plenoptic camera types which is on the one hand able to provide the ground truth data for research and on the other hand allows an inexpensive assessment of the cameras usefulness for the desired applications. Furthermore we show that the rendering results exhibit the same image degradation effects as real cameras and make our simulation publicly available.
Creating Realistic Ground Truth Data for the Evaluation of Calibration Methods for Plenoptic and Conventional Cameras
Mar 09, 2022



Camera calibration methods usually consist of capturing images of known calibration patterns and using the detected correspondences to optimize the parameters of the assumed camera model. A meaningful evaluation of these methods relies on the availability of realistic synthetic data. In previous works concerned with conventional cameras the synthetic data was mainly created by rendering perfect images with a pinhole camera and subsequently adding distortions and aberrations to the renderings and correspondences according to the assumed camera model. This method can bias the evaluation since not every camera perfectly complies with an assumed model. Furthermore, in the field of plenoptic camera calibration there is no synthetic ground truth data available at all. We address these problems by proposing a method based on backward ray tracing to create realistic ground truth data that can be used for an unbiased evaluation of calibration methods for both types of cameras.
* 9 pages, 8 figures. Accepted at 3DV 2019
Ray Tracing-Guided Design of Plenoptic Cameras
Mar 09, 2022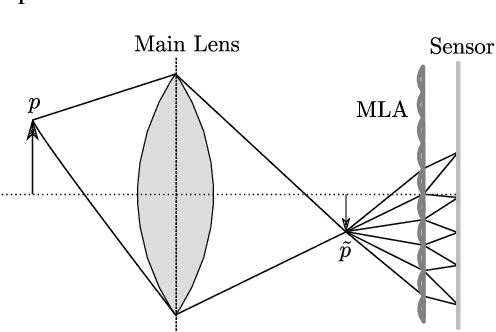
The design of a plenoptic camera requires the combination of two dissimilar optical systems, namely a main lens and an array of microlenses. And while the construction process of a conventional camera is mainly concerned with focusing the image onto a single plane, in the case of plenoptic cameras there can be additional requirements such as a predefined depth of field or a desired range of disparities in neighboring microlens images. Due to this complexity, the manual creation of multiple plenoptic camera setups is often a time-consuming task. In this work we assume a simulation framework as well as the main lens data given and present a method to calculate the remaining aperture, sensor and microlens array parameters under different sets of constraints. Our ray tracing-based approach is shown to result in models outperforming their pendants generated with the commonly used paraxial approximations in terms of image quality, while still meeting the desired constraints. Both the implementation and evaluation setup including 30 plenoptic camera designs are made publicly available.