 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRe-assembling the past: The RePAIR dataset and benchmark for real world 2D and 3D puzzle solving
Oct 31, 2024



This paper proposes the RePAIR dataset that represents a challenging benchmark to test modern computational and data driven methods for puzzle-solving and reassembly tasks. Our dataset has unique properties that are uncommon to current benchmarks for 2D and 3D puzzle solving. The fragments and fractures are realistic, caused by a collapse of a fresco during a World War II bombing at the Pompeii archaeological park. The fragments are also eroded and have missing pieces with irregular shapes and different dimensions, challenging further the reassembly algorithms. The dataset is multi-modal providing high resolution images with characteristic pictorial elements, detailed 3D scans of the fragments and meta-data annotated by the archaeologists. Ground truth has been generated through several years of unceasing fieldwork, including the excavation and cleaning of each fragment, followed by manual puzzle solving by archaeologists of a subset of approx. 1000 pieces among the 16000 available. After digitizing all the fragments in 3D, a benchmark was prepared to challenge current reassembly and puzzle-solving methods that often solve more simplistic synthetic scenarios. The tested baselines show that there clearly exists a gap to fill in solving this computationally complex problem.
Nash Meets Wertheimer: Using Good Continuation in Jigsaw Puzzles
Oct 22, 2024



Jigsaw puzzle solving is a challenging task for computer vision since it requires high-level spatial and semantic reasoning. To solve the problem, existing approaches invariably use color and/or shape information but in many real-world scenarios, such as in archaeological fresco reconstruction, this kind of clues is often unreliable due to severe physical and pictorial deterioration of the individual fragments. This makes state-of-the-art approaches entirely unusable in practice. On the other hand, in such cases, simple geometrical patterns such as lines or curves offer a powerful yet unexplored clue. In an attempt to fill in this gap, in this paper we introduce a new challenging version of the puzzle solving problem in which one deliberately ignores conventional color and shape features and relies solely on the presence of linear geometrical patterns. The reconstruction process is then only driven by one of the most fundamental principles of Gestalt perceptual organization, namely Wertheimer's {\em law of good continuation}. In order to tackle this problem, we formulate the puzzle solving problem as the problem of finding a Nash equilibrium of a (noncooperative) multiplayer game and use classical multi-population replicator dynamics to solve it. The proposed approach is general and allows us to deal with pieces of arbitrary shape, size and orientation. We evaluate our approach on both synthetic and real-world data and compare it with state-of-the-art algorithms. The results show the intrinsic complexity of our purely line-based puzzle problem as well as the relative effectiveness of our game-theoretic formulation.
* to be published in ACCV2024
Mitigation of Polarization-Induced Fading in Optical Vector Network Analyzer for the Characterization of km-scale Space-Division Multiplexing Fibers
Oct 10, 2024



We propose an optimized optical vector network analyzer with automatic polarization control to stabilize the reference arm polarization throughout the sweep range. We demonstrate this technique, successfully removing the polarization-induced fading and measurement distortions in insertion loss by characterizing a 10 km multi-core fiber.
Reassembling Broken Objects using Breaking Curves
Jun 05, 2023Reassembling 3D broken objects is a challenging task. A robust solution that generalizes well must deal with diverse patterns associated with different types of broken objects. We propose a method that tackles the pairwise assembly of 3D point clouds, that is agnostic on the type of object, and that relies solely on their geometrical information, without any prior information on the shape of the reconstructed object. The method receives two point clouds as input and segments them into regions using detected closed boundary contours, known as breaking curves. Possible alignment combinations of the regions of each broken object are evaluated and the best one is selected as the final alignment. Experiments were carried out both on available 3D scanned objects and on a recent benchmark for synthetic broken objects. Results show that our solution performs well in reassembling different kinds of broken objects.
Simulation of Plenoptic Cameras
Mar 09, 2022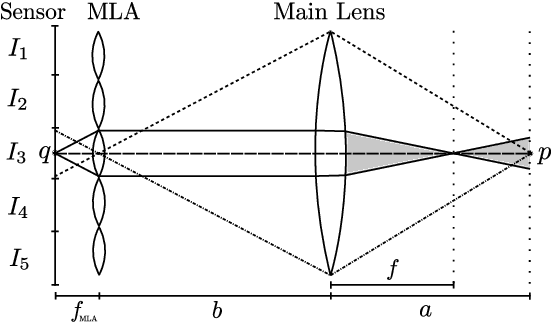
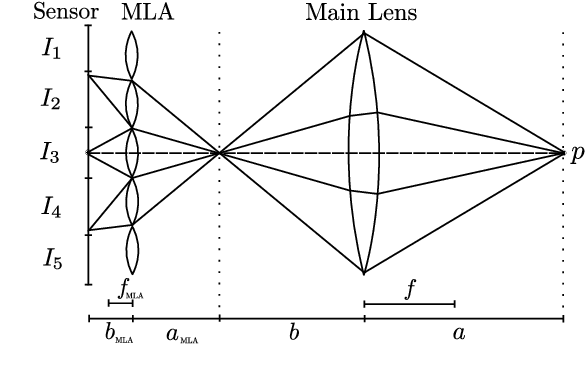


Plenoptic cameras enable the capturing of spatial as well as angular color information which can be used for various applications among which are image refocusing and depth calculations. However, these cameras are expensive and research in this area currently lacks data for ground truth comparisons. In this work we describe a flexible, easy-to-use Blender model for the different plenoptic camera types which is on the one hand able to provide the ground truth data for research and on the other hand allows an inexpensive assessment of the cameras usefulness for the desired applications. Furthermore we show that the rendering results exhibit the same image degradation effects as real cameras and make our simulation publicly available.