 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation of Plenoptic Cameras
Mar 09, 2022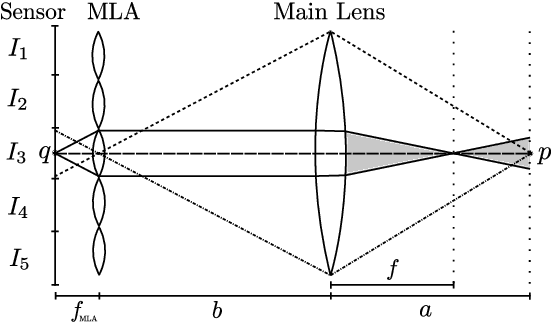
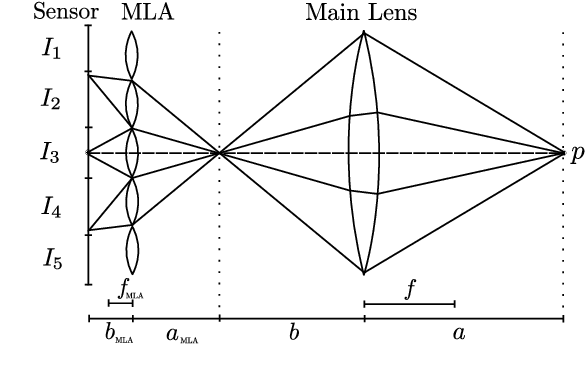


Plenoptic cameras enable the capturing of spatial as well as angular color information which can be used for various applications among which are image refocusing and depth calculations. However, these cameras are expensive and research in this area currently lacks data for ground truth comparisons. In this work we describe a flexible, easy-to-use Blender model for the different plenoptic camera types which is on the one hand able to provide the ground truth data for research and on the other hand allows an inexpensive assessment of the cameras usefulness for the desired applications. Furthermore we show that the rendering results exhibit the same image degradation effects as real cameras and make our simulation publicly available.
Creating Realistic Ground Truth Data for the Evaluation of Calibration Methods for Plenoptic and Conventional Cameras
Mar 09, 2022



Camera calibration methods usually consist of capturing images of known calibration patterns and using the detected correspondences to optimize the parameters of the assumed camera model. A meaningful evaluation of these methods relies on the availability of realistic synthetic data. In previous works concerned with conventional cameras the synthetic data was mainly created by rendering perfect images with a pinhole camera and subsequently adding distortions and aberrations to the renderings and correspondences according to the assumed camera model. This method can bias the evaluation since not every camera perfectly complies with an assumed model. Furthermore, in the field of plenoptic camera calibration there is no synthetic ground truth data available at all. We address these problems by proposing a method based on backward ray tracing to create realistic ground truth data that can be used for an unbiased evaluation of calibration methods for both types of cameras.
* 9 pages, 8 figures. Accepted at 3DV 2019