 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Year Urban Streetlight Imagery Dataset for Visual Monitoring and Spatio-Temporal Drift Detection
Dec 13, 2025

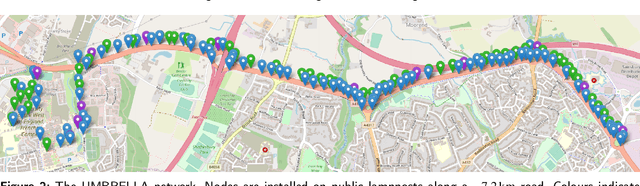

We present a large-scale, longitudinal visual dataset of urban streetlights captured by 22 fixed-angle cameras deployed across Bristol, U.K., from 2021 to 2025. The dataset contains over 526,000 images, collected hourly under diverse lighting, weather, and seasonal conditions. Each image is accompanied by rich metadata, including timestamps, GPS coordinates, and device identifiers. This unique real-world dataset enables detailed investigation of visual drift, anomaly detection, and MLOps strategies in smart city deployments. To promtoe seconardary analysis, we additionally provide a self-supervised framework based on convolutional variational autoencoders (CNN-VAEs). Models are trained separately for each camera node and for day/night image sets. We define two per-sample drift metrics: relative centroid drift, capturing latent space deviation from a baseline quarter, and relative reconstruction error, measuring normalized image-domain degradation. This dataset provides a realistic, fine-grained benchmark for evaluating long-term model stability, drift-aware learning, and deployment-ready vision systems. The images and structured metadata are publicly released in JPEG and CSV formats, supporting reproducibility and downstream applications such as streetlight monitoring, weather inference, and urban scene understanding. The dataset can be found at https://doi.org/10.5281/zenodo.17781192 and https://doi.org/10.5281/zenodo.17859120.
Adapting MLOps for Diverse In-Network Intelligence in 6G Era: Challenges and Solutions
Oct 24, 2024



Seamless integration of artificial intelligence (AI) and machine learning (ML) techniques with wireless systems is a crucial step for 6G AInization. However, such integration faces challenges in terms of model functionality and lifecycle management. ML operations (MLOps) offer a systematic approach to tackle these challenges. Existing approaches toward implementing MLOps in a centralized platform often overlook the challenges posed by diverse learning paradigms and network heterogeneity. This article provides a new approach to MLOps targeting the intricacies of future wireless networks. Considering unique aspects of the future radio access network (RAN), we formulate three operational pipelines, namely reinforcement learning operations (RLOps), federated learning operations (FedOps), and generative AI operations (GenOps). These pipelines form the foundation for seamlessly integrating various learning/inference capabilities into networks. We outline the specific challenges and proposed solutions for each operation, facilitating large-scale deployment of AI-Native 6G networks.
Demo: A Digital Twin of the 5G Radio Access Network for Anomaly Detection Functionality
Aug 30, 2023

Recently, the concept of digital twins (DTs) has received significant attention within the realm of 5G/6G. This demonstration shows an innovative DT design and implementation framework tailored toward integration within the 5G infrastructure. The proposed DT enables near real-time anomaly detection capability pertaining to user connectivity. It empowers the 5G system to proactively execute decisions for resource control and connection restoration.
Detecting and Controlling Smart Lights with LiTalk
Jan 30, 2023


The rapid increase in demand for wireless controlled Smart Lighting has created a need to automate the mapping between the identifiers for individual light sources and their physical locations. To control Smart Lights, their IDs and physical locations relative to each other must be determined. Nowadays, skilled technicians perform this process manually, which requires a lot of effort, is time-consuming, and incurs high costs, particularly with non-stationary lights. Visible Light Communication has been presented as a possible solution to this problem. This paper presents an approach based on Visible Light Communication that leverages Machine Learning to automate the mapping process between the identifiers and the relative physical location of Smart Lights. We show that our approach provides a better location-mapping performance compared to existing methods.
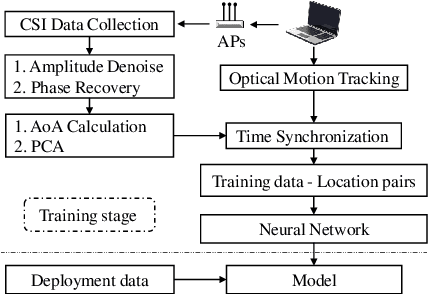
Deep Transfer Learning for WiFi Localization
Mar 08, 2021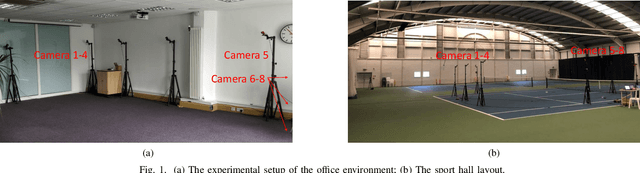
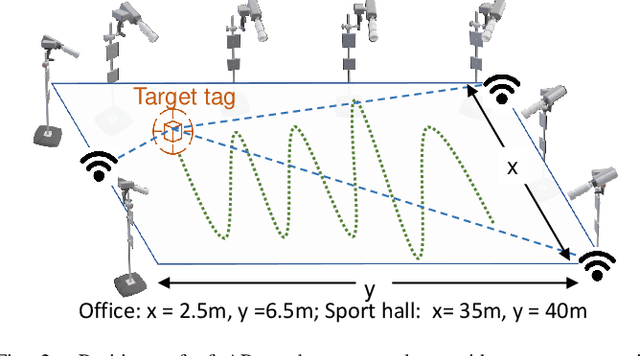
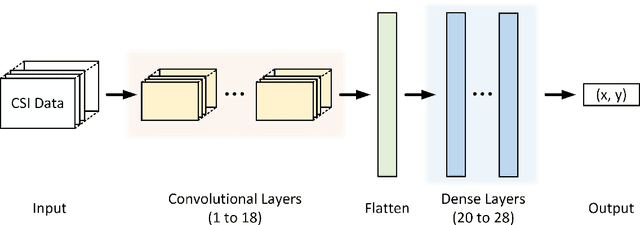
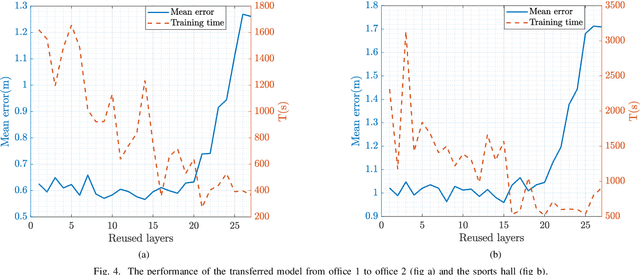
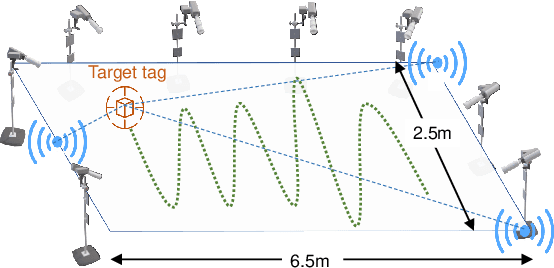
This paper studies a WiFi indoor localisation technique based on using a deep learning model and its transfer strategies. We take CSI packets collected via the WiFi standard channel sounding as the training dataset and verify the CNN model on the subsets collected in three experimental environments. We achieve a localisation accuracy of 46.55 cm in an ideal $(6.5m \times 2.5m)$ office with no obstacles, 58.30 cm in an office with obstacles, and 102.8 cm in a sports hall $(40 \times 35m)$. Then, we evaluate the transfer ability of the proposed model to different environments. The experimental results show that, for a trained localisation model, feature extraction layers can be directly transferred to other models and only the fully connected layers need to be retrained to achieve the same baseline accuracy with non-transferred base models. This can save 60% of the training parameters and reduce the training time by more than half. Finally, an ablation study of the training dataset shows that, in both office and sport hall scenarios, after reusing the feature extraction layers of the base model, only 55% of the training data is required to obtain the models' accuracy similar to the base models.
Wireless Localisation in WiFi using Novel Deep Architectures
Oct 16, 2020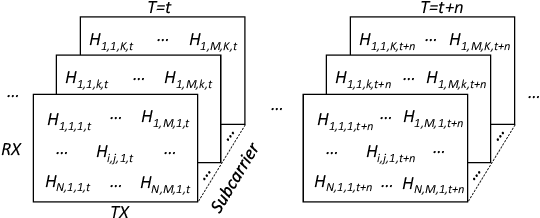
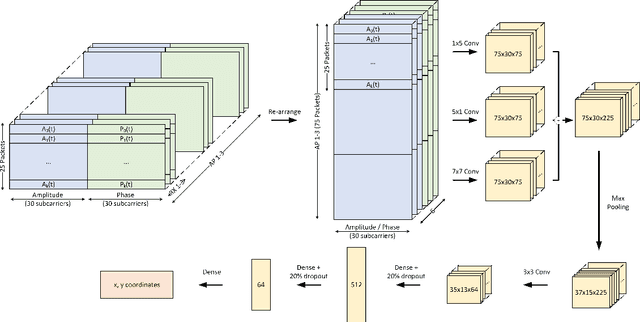
This paper studies the indoor localisation of WiFi devices based on a commodity chipset and standard channel sounding. First, we present a novel shallow neural network (SNN) in which features are extracted from the channel state information (CSI) corresponding to WiFi subcarriers received on different antennas and used to train the model. The single-layer architecture of this localisation neural network makes it lightweight and easy-to-deploy on devices with stringent constraints on computational resources. We further investigate for localisation the use of deep learning models and design novel architectures for convolutional neural network (CNN) and long-short term memory (LSTM). We extensively evaluate these localisation algorithms for continuous tracking in indoor environments. Experimental results prove that even an SNN model, after a careful handcrafted feature extraction, can achieve accurate localisation. Meanwhile, using a well-organised architecture, the neural network models can be trained directly with raw data from the CSI and localisation features can be automatically extracted to achieve accurate position estimates. We also found that the performance of neural network-based methods are directly affected by the number of anchor access points (APs) regardless of their structure. With three APs, all neural network models proposed in this paper can obtain localisation accuracy of around 0.5 metres. In addition the proposed deep NN architecture reduces the data pre-processing time by 6.5 hours compared with a shallow NN using the data collected in our testbed. In the deployment phase, the inference time is also significantly reduced to 0.1 ms per sample. We also demonstrate the generalisation capability of the proposed method by evaluating models using different target movement characteristics to the ones in which they were trained.
Standing on the Shoulders of Giants: AI-driven Calibration of Localisation Technologies
May 30, 2019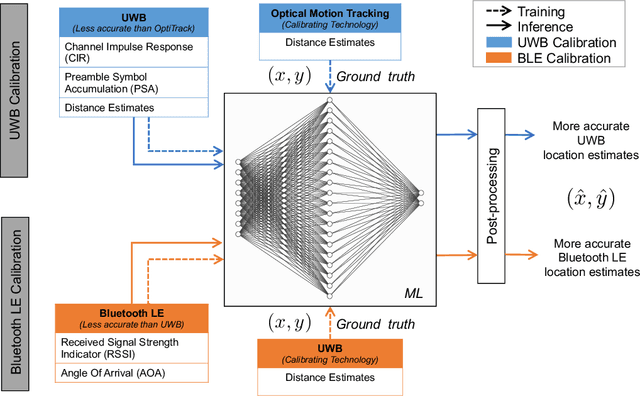
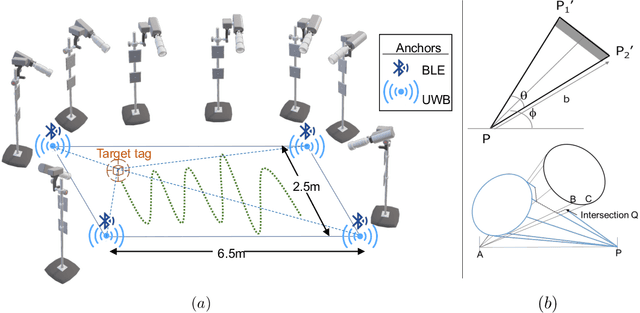
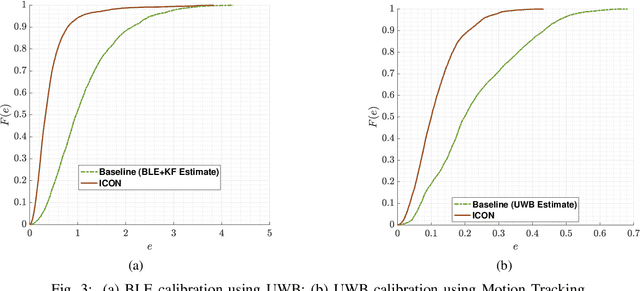
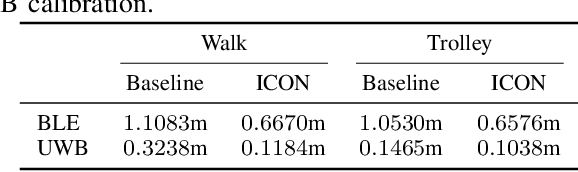
High accuracy localisation technologies exist but are prohibitively expensive to deploy for large indoor spaces such as warehouses, factories, and supermarkets to track assets and people. However, these technologies can be used to lend their highly accurate localisation capabilities to low-cost, commodity, and less-accurate technologies. In this paper, we bridge this link by proposing a technology-agnostic calibration framework based on artificial intelligence to assist such low-cost technologies through highly accurate localisation systems. A single-layer neural network is used to calibrate less accurate technology using more accurate one such as BLE using UWB and UWB using a professional motion tracking system. On a real indoor testbed, we demonstrate an increase in accuracy of approximately 70% for BLE and 50% for UWB. Not only the proposed approach requires a very short measurement campaign, the low complexity of the single-layer neural network also makes it ideal for deployment on constrained devices typically for localisation purposes.