 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemo: Untethered Haptic Teleoperation for Nuclear Decommissioning using a Low-Power Wireless Control Technology
Jun 27, 2022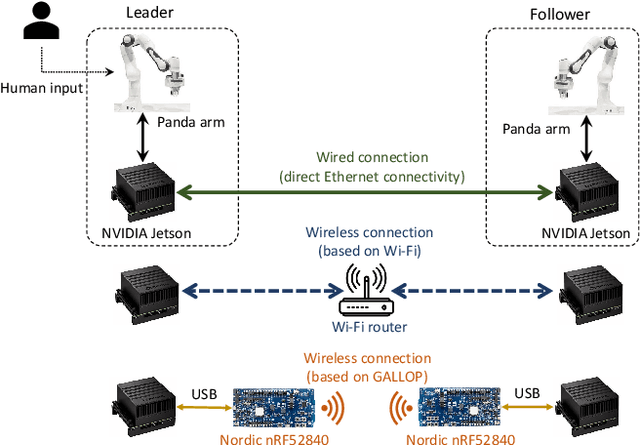
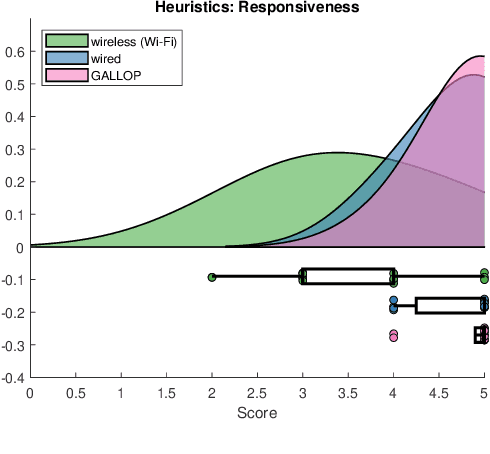
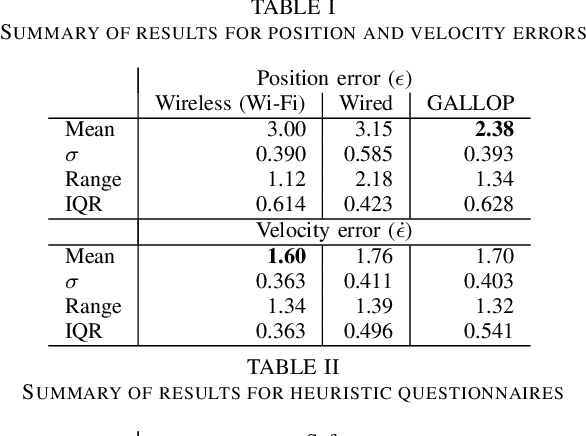
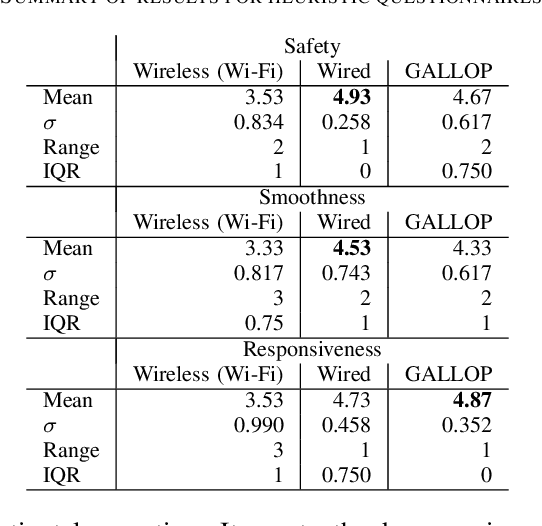
Haptic teleoperation is typically realized through wired networking technologies (e.g., Ethernet) which guarantee performance of control loops closed over the communication medium, particularly in terms of latency, jitter, and reliability. This demonstration shows the capability of conducting haptic teleoperation over a novel low-power wireless control technology, called GALLOP, in a nuclear decommissioning use-case. It shows the viability of GALLOP for meeting latency, timeliness, and safety requirements of haptic teleoperation. Evaluation conducted as part of the demonstration reveals that GALLOP, which has been implemented over an off-the-shelf Bluetooth 5.0 chipset, can be a replacement for conventional wired TCP/IP connection, and outperforms WiFi-based wireless solution in same use-case.
A Dataset of Images of Public Streetlights with Operational Monitoring using Computer Vision Techniques
Apr 01, 2022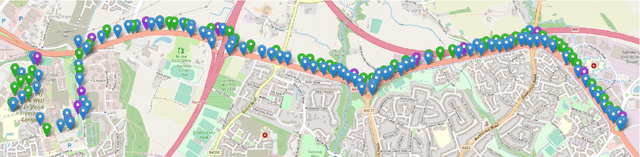
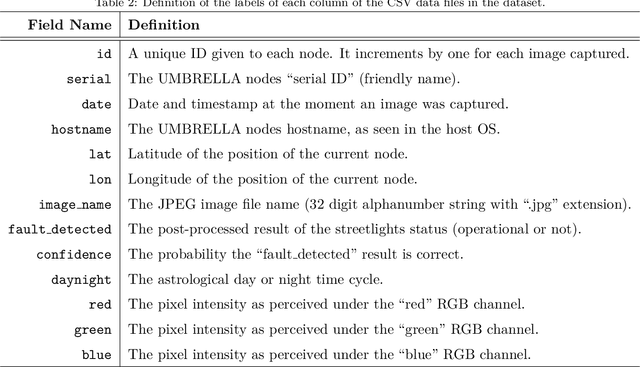


A dataset of street light images is presented. Our dataset consists of $\sim350\textrm{k}$ images, taken from 140 UMBRELLA nodes installed in the South Gloucestershire region in the UK. Each UMBRELLA node is installed on the pole of a lamppost and is equipped with a Raspberry Pi Camera Module v1 facing upwards towards the sky and lamppost light bulb. Each node collects an image at hourly intervals for 24h every day. The data collection spans for a period of six months. Each image taken is logged as a single entry in the dataset along with the Global Positioning System (GPS) coordinates of the lamppost. All entries in the dataset have been post-processed and labelled based on the operation of the lamppost, i.e., whether the lamppost is switched ON or OFF. The dataset can be used to train deep neural networks and generate pre-trained models providing feature representations for smart city CCTV applications, smart weather detection algorithms, or street infrastructure monitoring. The dataset can be found at \url{https://doi.org/10.5281/zenodo.6046758}.
Demo: Closed-Loop Control over Wireless -- Remotely Balancing an Inverted Pendulum on Wheels
Mar 23, 2020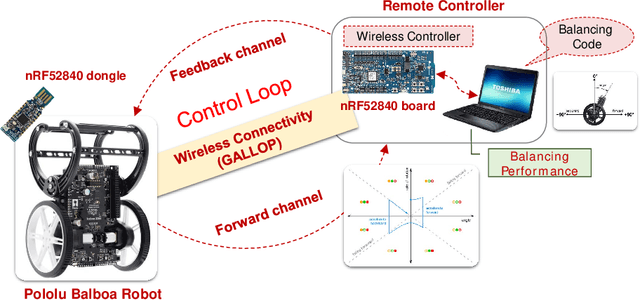
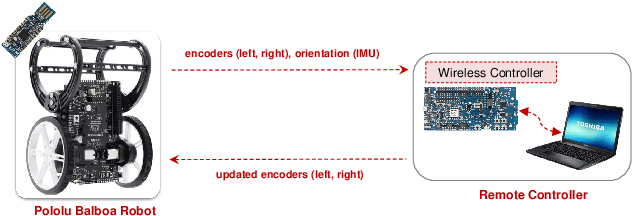
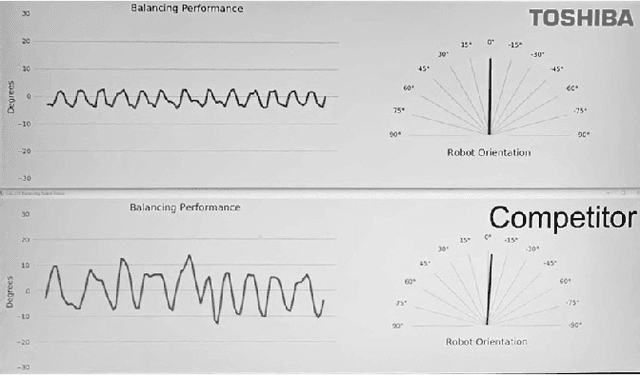
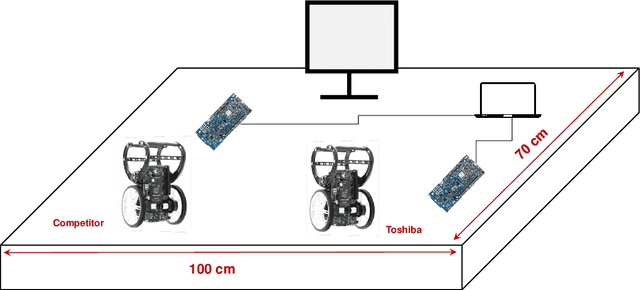
Achieving closed-loop control over wireless is crucial in realizing the vision of Industry 4.0 and beyond. This demonstration shows the viability of closed-loop control over wireless through a high-performance wireless solution. The closed-loop control problem involves remote balancing of a two-wheeled robot that represents an inverted pendulum on wheels.
Standing on the Shoulders of Giants: AI-driven Calibration of Localisation Technologies
May 30, 2019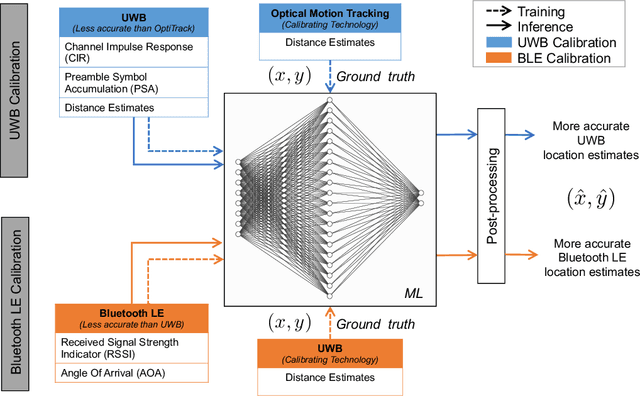
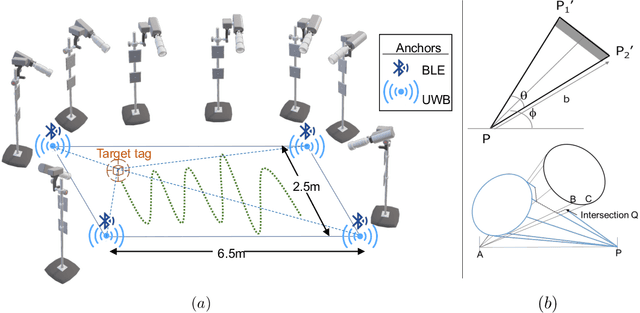
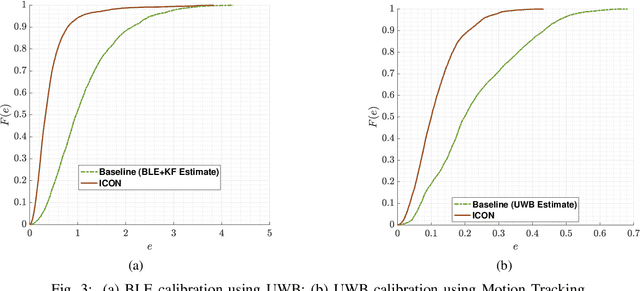
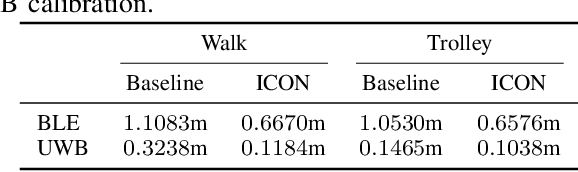
High accuracy localisation technologies exist but are prohibitively expensive to deploy for large indoor spaces such as warehouses, factories, and supermarkets to track assets and people. However, these technologies can be used to lend their highly accurate localisation capabilities to low-cost, commodity, and less-accurate technologies. In this paper, we bridge this link by proposing a technology-agnostic calibration framework based on artificial intelligence to assist such low-cost technologies through highly accurate localisation systems. A single-layer neural network is used to calibrate less accurate technology using more accurate one such as BLE using UWB and UWB using a professional motion tracking system. On a real indoor testbed, we demonstrate an increase in accuracy of approximately 70% for BLE and 50% for UWB. Not only the proposed approach requires a very short measurement campaign, the low complexity of the single-layer neural network also makes it ideal for deployment on constrained devices typically for localisation purposes.