 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotDiffuse: Motion Planning for Redundant Manipulator based on Diffusion Model
Dec 27, 2024



Redundant manipulators, with their higher Degrees of Freedom (DOFs), offer enhanced kinematic performance and versatility, making them suitable for applications like manufacturing, surgical robotics, and human-robot collaboration. However, motion planning for these manipulators is challenging due to increased DOFs and complex, dynamic environments. While traditional motion planning algorithms struggle with high-dimensional spaces, deep learning-based methods often face instability and inefficiency in complex tasks. This paper introduces RobotDiffuse, a diffusion model-based approach for motion planning in redundant manipulators. By integrating physical constraints with a point cloud encoder and replacing the U-Net structure with an encoder-only transformer, RobotDiffuse improves the model's ability to capture temporal dependencies and generate smoother, more coherent motion plans. We validate the approach using a complex simulator, and release a new dataset with 35M robot poses and 0.14M obstacle avoidance scenarios. Experimental results demonstrate the effectiveness of RobotDiffuse and the promise of diffusion models for motion planning tasks. The code can be accessed at https://github.com/ACRoboT-buaa/RobotDiffuse.
Deep Learning based Intelligent Coin-tap Test for Defect Recognition
Mar 20, 2022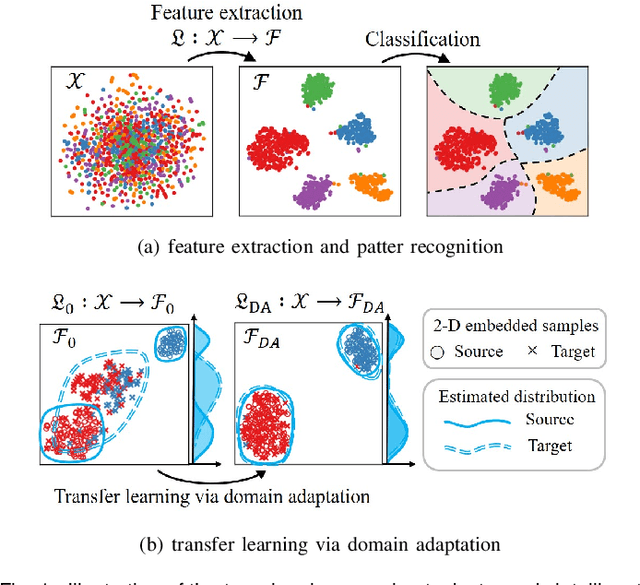
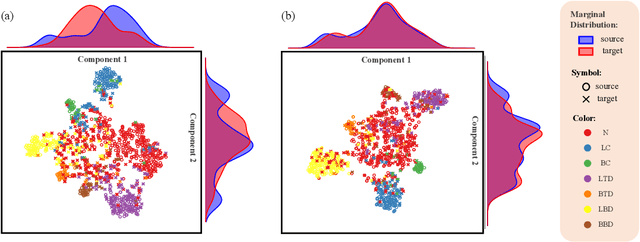
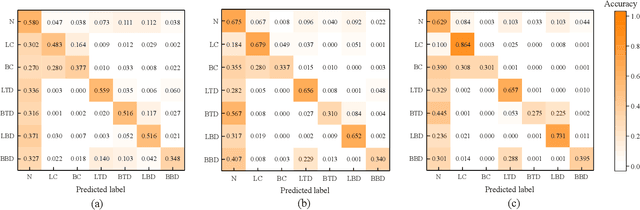
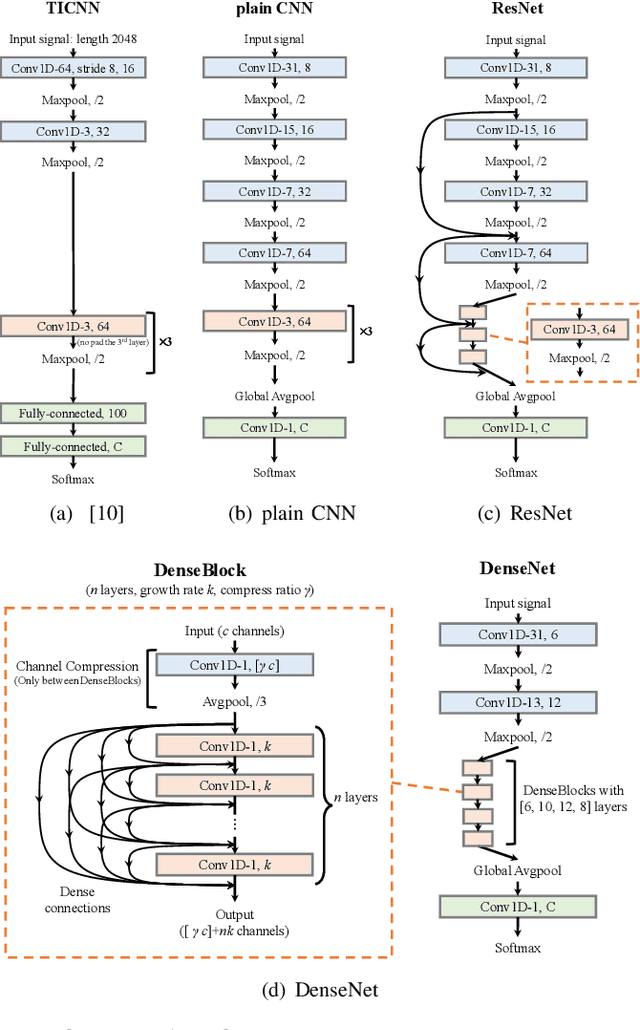
The coin-tap test is a convenient and primary method for non-destructive testing, while its manual on-site operation is tough and costly. With the help of the latest intelligent signal processing method, convolutional neural networks (CNN), we achieve an intelligent coin-tap test which exhibited superior performance in recognizing the defects. However, this success of CNNs relies on plenty of well-labeled data from the identical scenario, which could be difficult to get for many real industrial practices. This paper further develops transfer learning strategies for this issue, that is, to transfer the model trained on data of one scenario to another. In experiments, the result presents a notable improvement by using domain adaptation and pseudo label learning strategies. Hence, it becomes possible to apply the model into scenarios with none or little (less than 10\%) labeled data adopting the transfer learning strategies proposed herein. In addition, we used a benchmark dataset constructed ourselves throughout this study. This benchmark dataset for the coin-tap test containing around 100,000 sound signals is published at https://github.com/PPhub-hy/torch-tapnet.
Learning Transient Partial Differential Equations with Local Neural Operators
Mar 11, 2022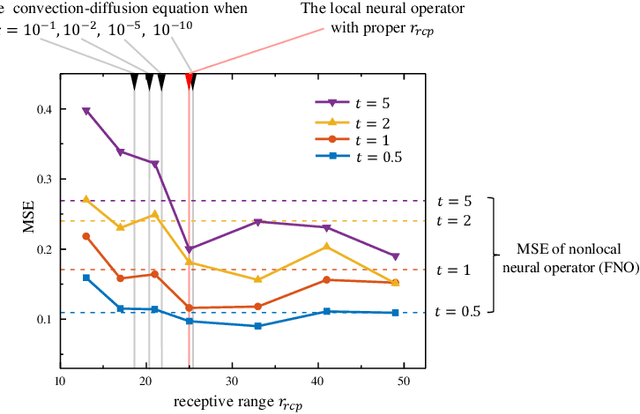
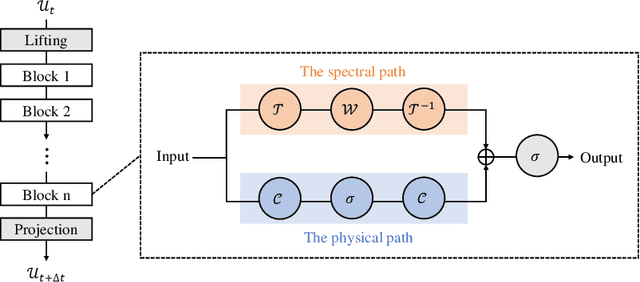
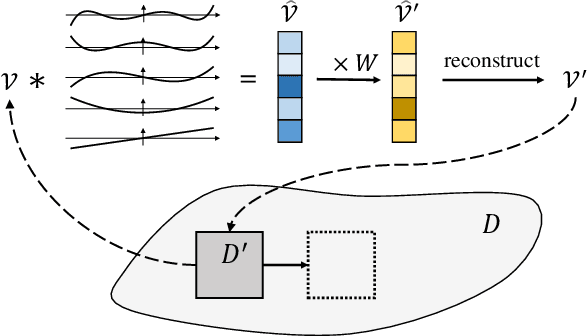
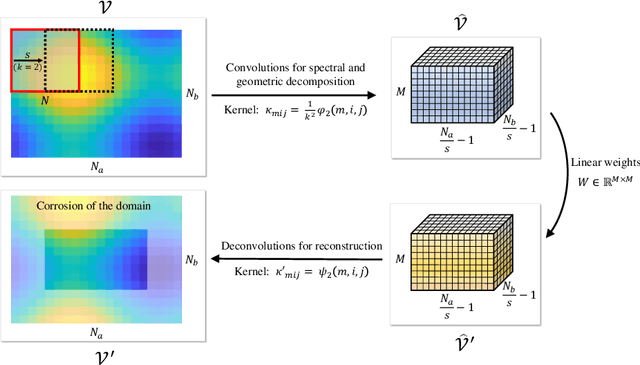
In decades, enormous computational resources are poured into solving the transient partial differential equations for multifarious physical fields. The latest artificial intelligence has shown great potential in accelerating these computations, but its road to wide applications is hindered by the variety of computational domains and boundary conditions. Here, we overcome this obstacle by constructing a learning framework capable of purely representing the transient PDEs with local neural operators (LNOs). This framework is demonstrated in learning several transient PDEs, especially the Navier-Stokes equations, and successfully applied to solve problems with quite different domains and boundaries, including the internal flow, the external flow, and remarkably, the flow across the cascade of airfoils. In these applications, our LNOs are faster than the conventional numerical solver by over 1000 times, which could be significant for scientific computations and engineering simulations.
A Study on Evaluation Standard for Automatic Crack Detection Regard the Random Fractal
Jul 23, 2020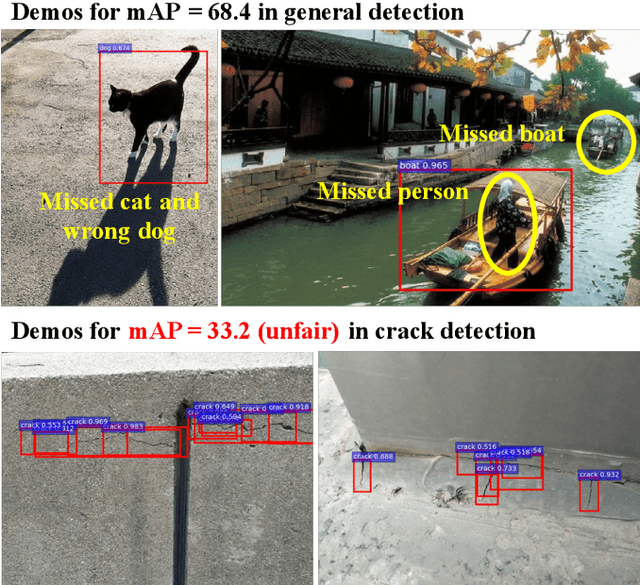
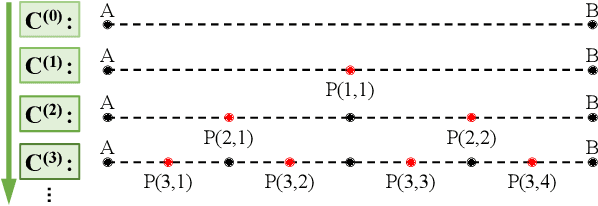
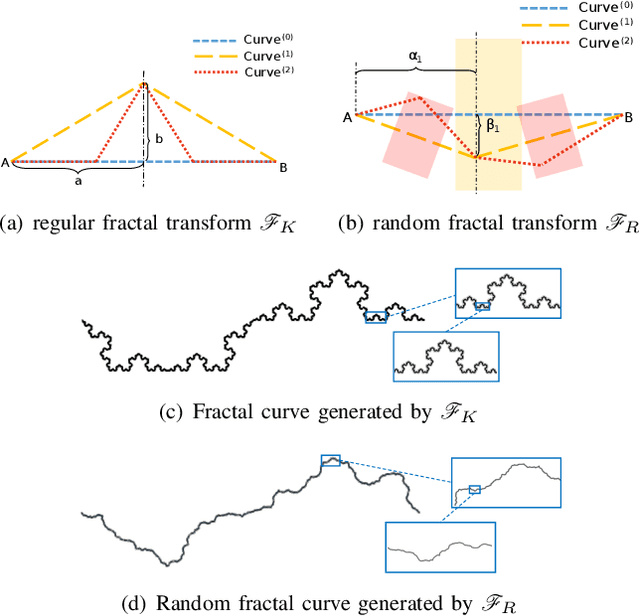
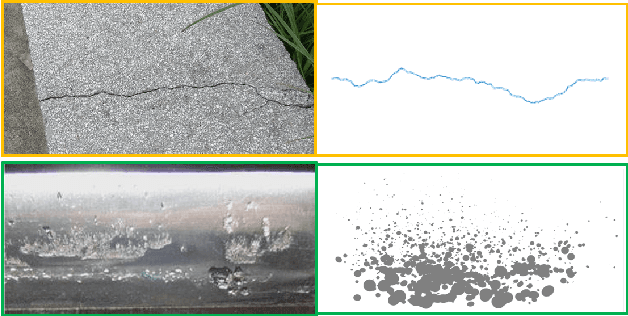
A reasonable evaluation standard underlies construction of effective deep learning models. However, we find in experiments that the automatic crack detectors based on deep learning are obviously underestimated by the widely used mean Average Precision (mAP) standard. This paper presents a study on the evaluation standard. It is clarified that the random fractal of crack disables the mAP standard, because the strict box matching in mAP calculation is unreasonable for the fractal feature. As a solution, a fractal-available evaluation standard named CovEval is proposed to correct the underestimation in crack detection. In CovEval, a different matching process based on the idea of covering box matching is adopted for this issue. In detail, Cover Area rate (CAr) is designed as a covering overlap, and a multi-match strategy is employed to release the one-to-one matching restriction in mAP. Extended Recall (XR), Extended Precision (XP) and Extended F-score (Fext) are defined for scoring the crack detectors. In experiments using several common frameworks for object detection, models get much higher scores in crack detection according to CovEval, which matches better with the visual performance. Moreover, based on faster R-CNN framework, we present a case study to optimize a crack detector based on CovEval standard. Recall (XR) of our best model achieves an industrial-level at 95.8, which implies that with reasonable standard for evaluation, the methods for object detection are with great potential for automatic industrial inspection.